5.10 Detailed Troubleshooting
260 YASKAWA TM.V1000.01 V1000 Drive Installation & Start-Up Manual (Preliminary 01-19-07)
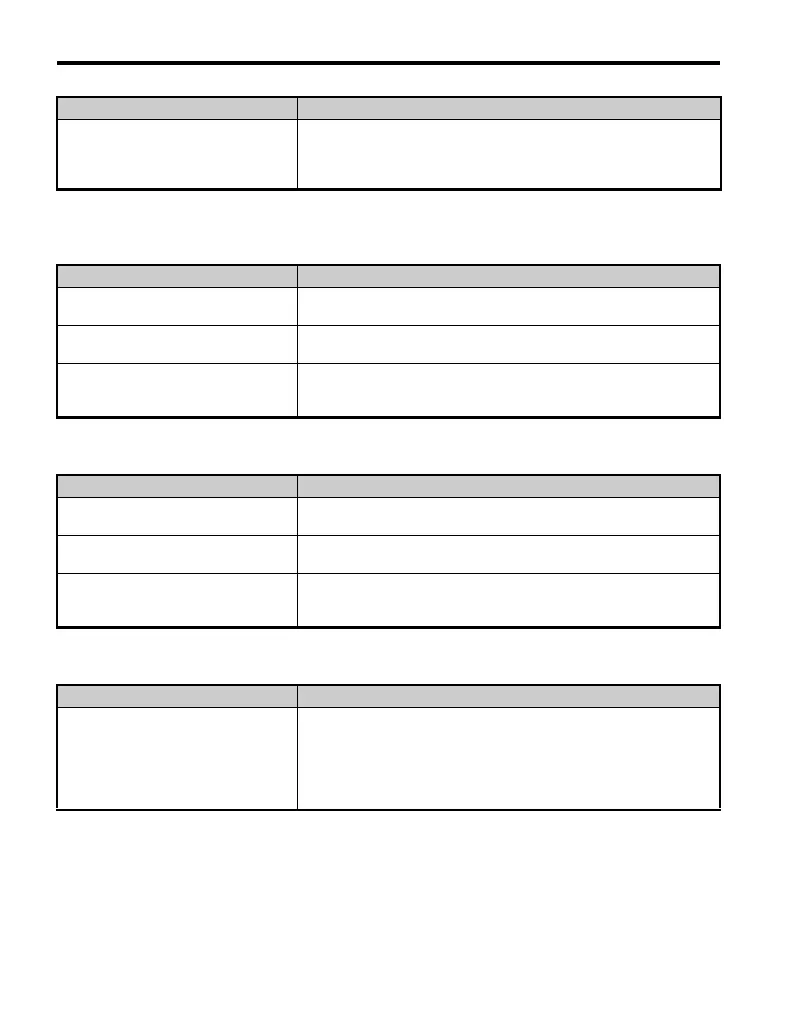
■ Motor Does Not Operate When the RUN Button on the Digital
Operator is Pressed
■ Motor Does Not Operate When an External Run Command is Input
■ Motor Stops During Acceleration or When a Load is Connected
Motor hunting occurs.
Set and carefully adjust the following parameters in the order listed:
n8-45 (Speed Feedback Detection Suppression Gain)
n8-47 (Pull-In Current Compensation Time Constant)
C4-02 (Torque Compensation Primary Delay Time)
Cause Possible Solutions
The LOCAL/REMOTE mode is not
selected properly.
Press the LOCAL/REMOTE button to switch. The LO/RE LED should be
on for LOCAL mode.
The drive is not in Drive mode.
A run command will not be issued. Exit to the Drive mode and cycle the
run command.
The Speed Command is too low.
• If the Speed Command is set below the frequency set in E1-09
(Minimum Output Frequency), the drive will not operate.
• Raise the Speed Command to at least the minimum output frequency.
Cause Possible Solutions
The LOCAL/REMOTE mode is not
selected properly.
Press the LOCAL/REMOTE button to switch. The LO/RE LED should be
off for REMOTE mode.
The drive is not in Drive mode.
A run command will not be issued. Exit to the Drive mode and cycle the
run command.
The Speed Command is too low.
• If the Speed Command is set below the frequency set in E1-09
(Minimum Output Frequency), the drive will not operate.
• Raise the Speed Command to at least the minimum output frequency.
Cause Possible Solution
• The load is too heavy.
• The limit of motor response may be
reached during rapid acceleration. This
may be a result of improper stall
prevention or automatic torque boost
function adjustment. (L3-01 = 2)
Increase the acceleration time (C1-01) or reduce the motor load. Also,
consider increasing the motor size and/or drive size.
Cause Possible Solutions

 Loading...
Loading...










