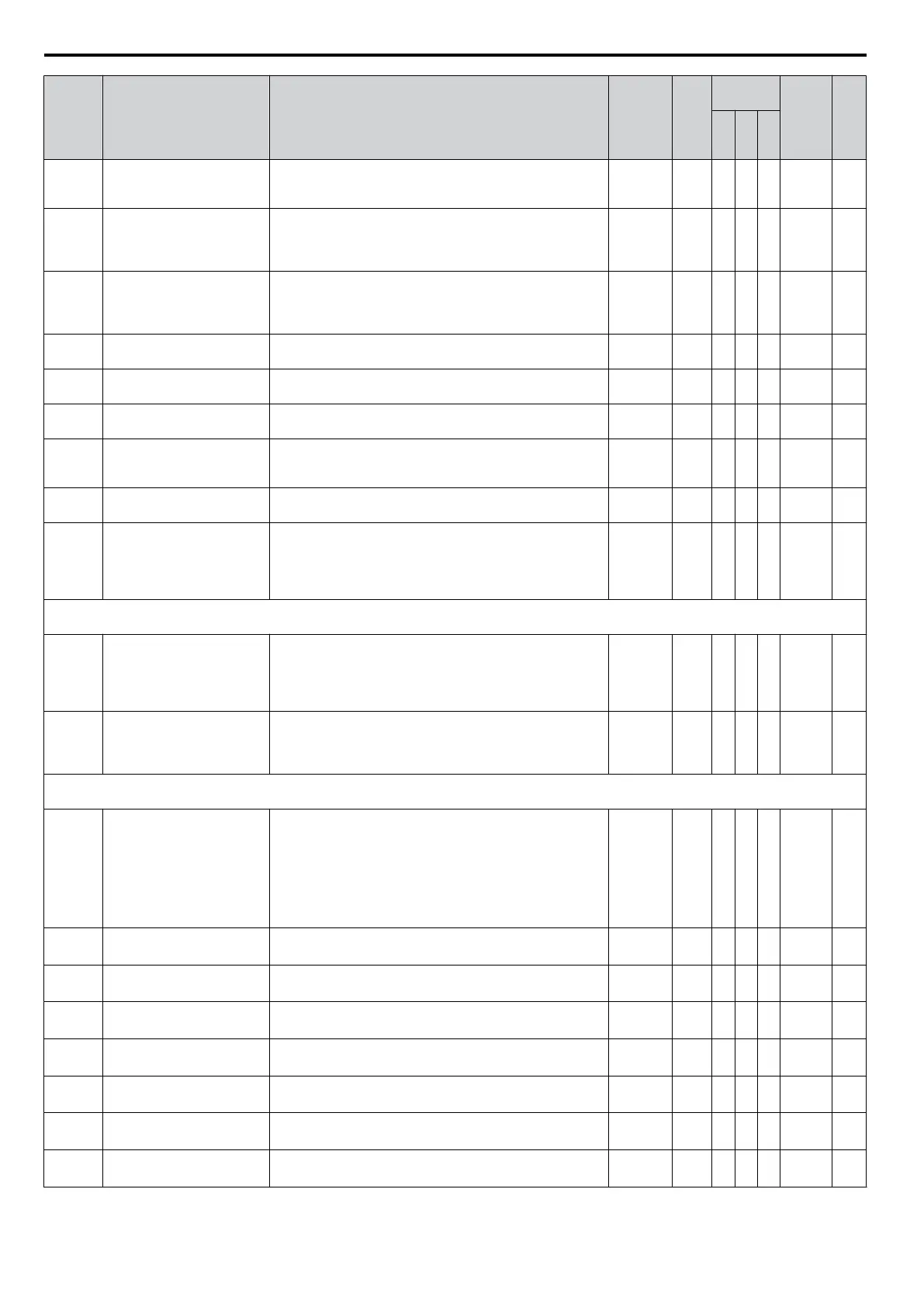
No. Name Description Range Def.
Control
Mode
Addr.
Hex
Pg.
V/
f
O
L
V
P
M
b3-08
<11>
Current Control Gain during
Speed Search (Speed
Estimation Type)
Sets the proportional gain for the current controller during
Speed Search. There is normally no need to change this
parameter from the default value.
0.00 to
6.00
<12>
A A A 198 128
b3-10
Speed Search Detection
Compensation Gain
Sets the gain which is applied to the speed detected by Speed
Estimation Speed Search before the motor is reaccelerated.
Increase this setting if ov occurs when performing Speed
Search.
1.00 to
1.20
1.05 A A − 19A 129
b3-14
Bi-Directional Speed Search
Selection
Selects if Speed Search detects the motor rotation direction
during Speed Search.
0: Disabled–Frequency reference direction used
1: Enabled–Detected direction used
0, 1 0 A A − 19E 129
b3-17
Speed Search Restart
Current Level
Sets the Speed Search restart current level as a percentage of
the drive rated current.
0 to 200 150% A A − 1F0 129
b3-18
Speed Search Restart
Detection Time
Sets the time in seconds for Speed Search restart to be
detected.
0.00 to
1.00
0.10 s A A − 1F1 129
b3-19
Number of Speed Search
Restarts
Sets the number of restarts possible for Speed Search restart
operations.
0 to 10 3 A A − 1F2 129
b3-24
Speed Search Method
Selection
Sets the Speed Search detection mode.
0: Current Detection Type
1: Speed Estimation Type
0, 1 0 A A − 1C0 129
b3-25
Speed Search Retry Interval
Time
Sets the wait time before Speed Search restarts. 0 to 30.0 0.5 s A A A 1C8 129
b3-29
<5>
Speed Search Induced
Voltage Level
Performs Speed Search when the motor induced voltage
exceeds the set level. This setting rarely needs to be changed.
If changes are necessary, try lowering this value in small
increments. If set too low, then the drive will not perform
Speed Search.
0 to 10 10% – – A 77C 130
b4: Timer Function
Use b4 parameters to configure timer function operation.
b4-01
Timer Function On-Delay
Time
Used in conjunction with a multi-function digital input (H1-
oo = 18) and a multi-function digital output (H2-oo = 12)
programmed for the timer function. This sets the amount of
time between digital input closure and digital output
activation.
0.0 to
300.0
0.0 s A A A 1A3 130
b4-02
Timer Function Off-Delay
Time
Used in conjunction with a multi-function digital input (H1-
oo = 18) and a multi-function digital output programmed
for
the timer function. This sets the amount
of time the output
remains activated after the digital input is opened.
0.0 to
300.0
0.0 s A A A 1A4 130
b5: PID Control
Use b5 parameters to configure the PID control drive function.
b5-01 PID Function Setting
Sets the PID control mode.
0: Disabled
1: Enable (PID output = freq. ref., PID
input is D-controlled)
2: (PID output = freq. ref., PID feedback is D-controlled)
3: Enable (PID output added to freq. ref., PID input is D-
controlled)
4: Enable (PID output added to freq. ref., PID feedback is D-
controlled)
0 to 4 0 A A A 1A5 134
b5-02
<6>
Proportional Gain Setting
(P)
Sets the proportional gain of the PID controller. A setting of
0.00 disables P control.
0.00 to
25.00
1.00 A A A 1A6 134
b5-03
<6>
Integral Time Setting (I)
Sets the integral time for the PID controller. A setting of 0.0
s disables integral control.
0.0 to
360.0
1.0 s A A A 1A7 134
b5-04
<6>
Integral Limit Setting Sets the maximum output possible from the integrator.
0.0 to
100.0
100.0
%
A A A 1A8 134
b5-05
<6>
Derivative Time (D)
Sets D control derivative time. A setting of 0.00 s disables
derivative control.
0.00 to
10.00
0.00 s A A A 1A9 134
b5-06
<6>
PID Output Limit
Sets the maximum output possible from the entire PID
controller.
0.0 to
100.0
100.0
%
A A A 1AA 135
b5-07
<6>
PID Offset Adjustment Applies an offset to the PID controller output.
-100.0 to
+100.0
0.0% A A A 1AB 135
b5-08
<6>
PID Primary Delay Time
Constant
Sets the amount of time for the filter on the output of the PID
controller.
0.00 to
10.00
0.00 s A A A 1AC 135
B.2 Parameter Table
334
YASKAWA ELECTRIC SIEP C710606 16C YASKAWA AC Drive – V1000 Technical Manual

 Loading...
Loading...















