Configuration
Parameter manual b maXX BM5800
Document No.: 5.16029.03 Baumüller Nürnberg GmbH
158
of 814
3.4
An electrical angle less than 45° is recommended using synchronous machines. Thus a
positive feedback in the current closed loop can be avoided at a slowly growing position
actual value error. Recommendation for setting:
14.22 Position monitoring error
Present difference between the digital position and the analog position from the sine-co-
sine traces. Updating interval approx. 500 ms. Mechanical angle in degrees.
The digital resolution Z137.28– and the number of pulses Z137.1– restrict the possible
resolution of the encoder.
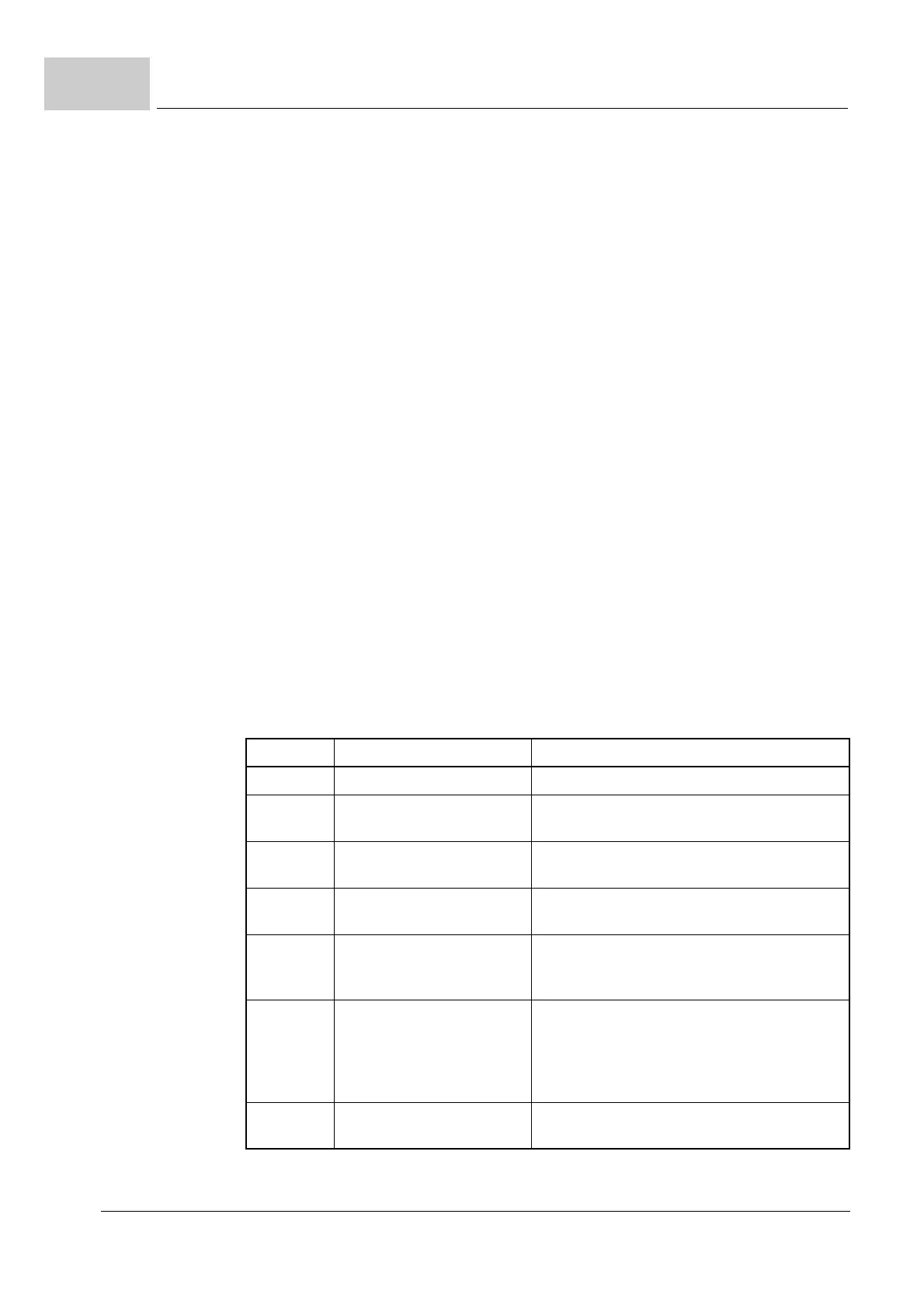
106.1 Encoder type
Selection of encoder type and thus the type of encoder evaluation.
Error threshold 14.21
45°
Pole pairs 107.19
-----------------------------------------
Error 14.22 Digital position Analog position–=
Value Encoder type Remark
0 No encoder
1 Resolver Excitation frequency 7.8125 kHz;
transmission ratio 0.5;
2 Square-wave incremental
encoder
5V with sensing line;
signal RS422 (TTL)
3 Sine-Cosine incremental
encoder
5V with sensing line, signal ~1 Vpp
4 Sine-Cosine incremental
encoder with HIPER
-
FACE
Absolute value encoder of SICK-Stegmann
GmbH; incremental signal ~1 Vpp
5 Sine-Cosine incremental
encoder with EnDat
Absolute value encoder of Dr. Joh. Heiden-
hain GmbH with incremental signal ~1 Vpp
recognizable by the designation of order
EnDat
01 or EnDat 02
see Z137.20–
6 Sine-Cosine encoder with
SSI interface
Absolute value encoder with incremental
signal ~1 Vpp