Chapter 11 Motion Control Instructions
11-25
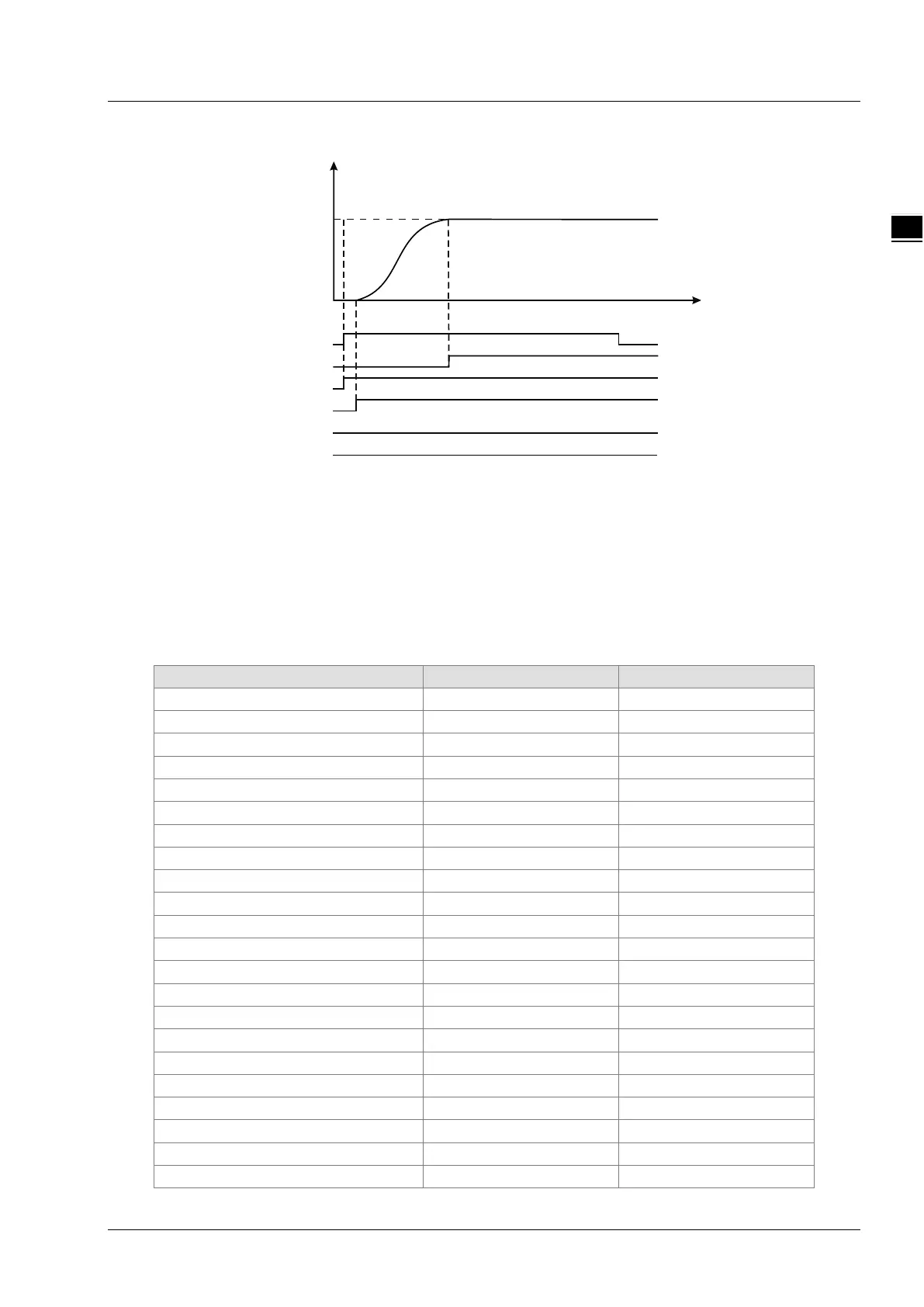
2. Motion Curve and Timing Chart
When Vel_Ex changes from FALSE to TRUE, Vel_Bsy changes to TRUE. One cycle later,
Vel_Act changes to TRUE and the execution of the velocity instruction starts. When the target
velocity is reached, Vel_Invel changes to TRUE and Vel_Bsy and Vel_Act remain TRUE.
When Vel_Ex changes from TRUE to FALSE, Vel_Inve, Vel_Bsy and Vel_Act remain TRUE.
Programming Example 2
Below is the example that one MC_MoveVelocity instruction aborts another MC_MoveVelocity
instruction.
1. The variable table and program
Axis1
USINT
1
Pwr_Bsy
BOOL
Pwr_ErrID
WORD
Vel1_Dir
MC_DIRECTION
1
Vel_Ex
Vel_Invel
Vel_Bsy
Vel_Act
Vel_Abt
Vel_Err
300
Velocity
Time
Vel

 Loading...
Loading...








