DVP-15MC Series Motion Controller Operation Manual
11-32
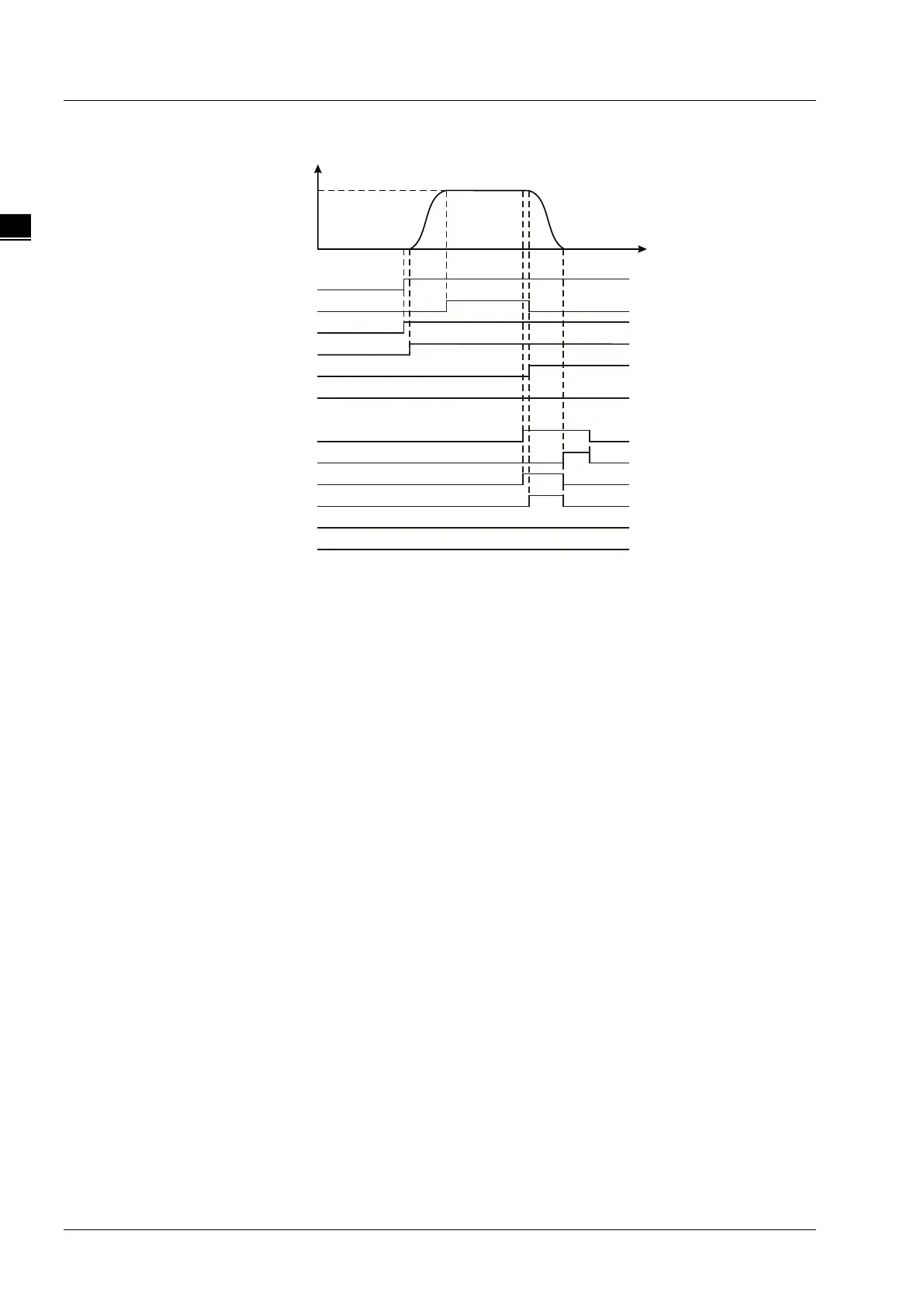
2. Motion Curve and Timing Charts:
When Vel_Ex changes to TRUE, Vel_Bsy changes to TRUE and one period later, Vel_Act
changes to TRUE and the servo motor starts to move forward. Vel_Invel changes to TRUE as
the servo motor reaches the target velocity.
When Hlt_Ex changes to TRUE, Hlt_Bsy changes to TRUE and one period later, Hlt_Act
changes to TRUE. Meanwhile, Vel_Invel changes to FALSE and Vel_Abt changes to TRUE
and then the servo motor starts to decelerate.
When the axis velocity is decreased to 0, Hlt_Done changes to TRUE and meanwhile, Hlt_Bsy
and Hlt_Act change to FALSE.
As Hlt_Ex changes to FALSE, Hlt_Done changes to FALSE.
10000
Velocity
Time
Vel_Invel
Vel_Err
Vel_Ex
Vel_Abt
Vel_Bsy
Vel_Act
MC_Velocity
Hlt_Done
Hlt_Err
Hlt_Ex
Hlt_Abt
Hlt_Bsy
Hlt_Act
MC_Halt

 Loading...
Loading...








