DVP-15MC Series Motion Controller Operation Manual
11-172
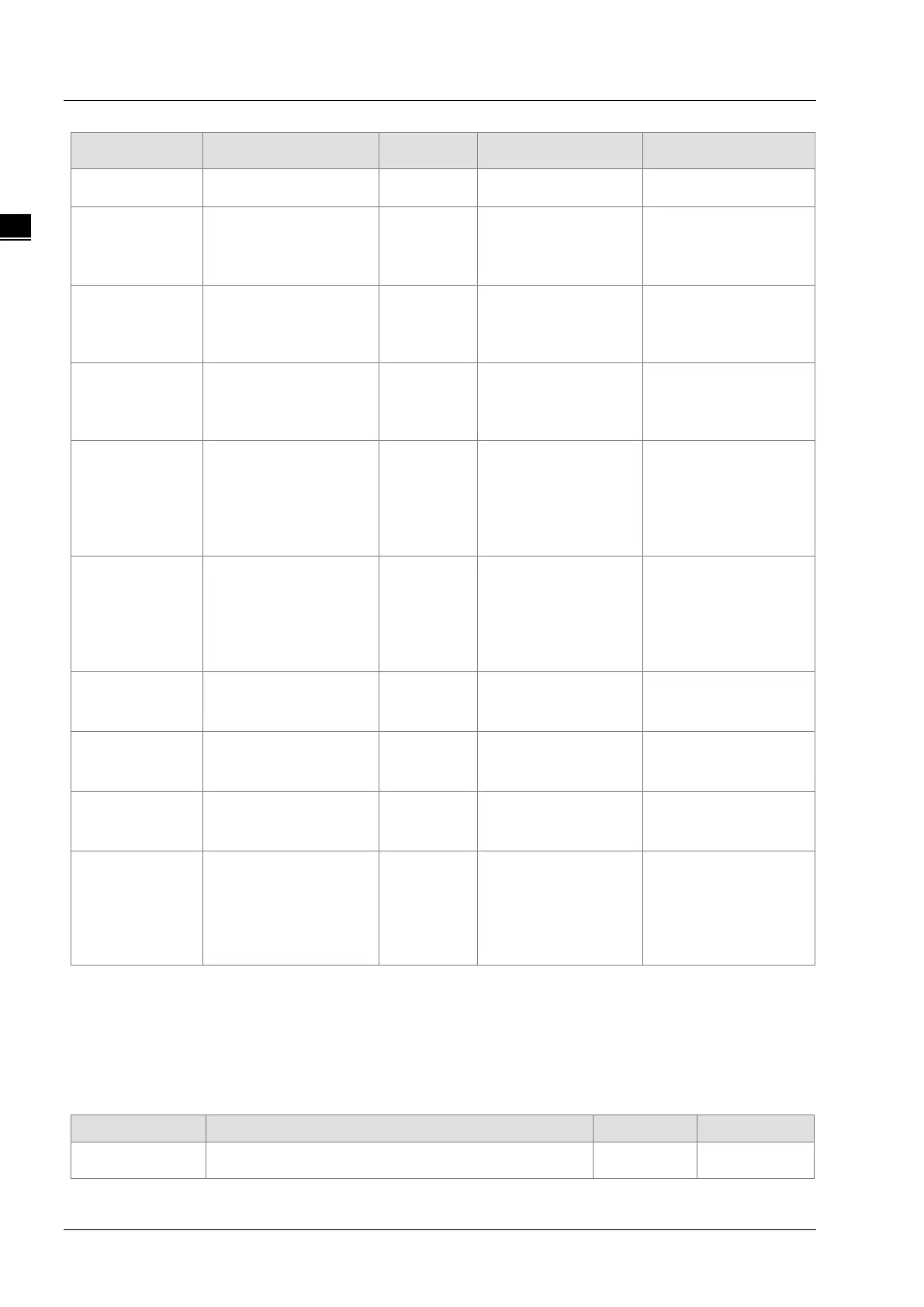
Parameter name Function Data type
Validation timing
(The variable value
must be set)
GearRatioDenom
inatorM1
Specify the master
axis1 gear ratio
denominator.
LREAL
negative number
(The variable value
When Execute
changes from FALSE
to TRUE
GearRatioNumer
atorM2
Specify the master
axis2 gear ratio
numerator.
LREAL
negative number
(The variable value
When Execute
changes from FALSE
to TRUE
GearRatioDenom
inatorM2
Specify the master
axis2 gear ratio
denominator.
LREAL
negative number
(The variable value
When Execute
changes from FALSE
to TRUE
MasterValueSour
ceM1
synchronization position
source of master axis 1.
0:Command position
1:Actual position
MC_SOURC
E
0:mcSetValue
1:mcActualValue
(0)
When Execute
changes from FALSE
to TRUE
MasterValueSour
ceM2
synchronization position
source of master axis 2.
0:Command position
1:Actual position
MC_SOURC
E
0:mcSetValue
1:mcActualValue
(0)
When Execute
changes from FALSE
to TRUE
Acc
Specify the acceleration
for the slave axis.
LREAL
(The variable value
When Execute
changes from FALSE
to TRUE
Dec
Specify the deceleration
for the slave axis.
LREAL
(The variable value
Execute
changes from FALSE
to TRUE
Jerk
Specify the change rate
of the acceleration for
LREAL
Positive number
(The variable value
When Execute
changes from FALSE
BufferMode
when executing two
instructions.
0:Aborted
1:Buffered
MC_Buffer_
Mode
0 : mcAborting
1 : mcBuffered
(0)
When Execute
changes from FALSE
to TRUE
Notes:
1. The instruction execution starts when Execute changes from FALSE to TRUE. When Execute
changes from FALSE to TRUE again no matter whether the instruction execution is completed or
not, the instruction cannot be re-executed and the previous setting values will be kept.
2. Refer to section 10.2 for the relation among Position, Velocity, Acceleration and Jerk.
3. Refer to section 10.3 for the details about BufferMode.
Output Parameters
Parameter name Function Data type Valid range
InSync
TRUE when the slave axis has completed the
synchronization action.
BOOL TRUE / FALSE

 Loading...
Loading...








