Chapter 11 Motion Control Instructions
11-183
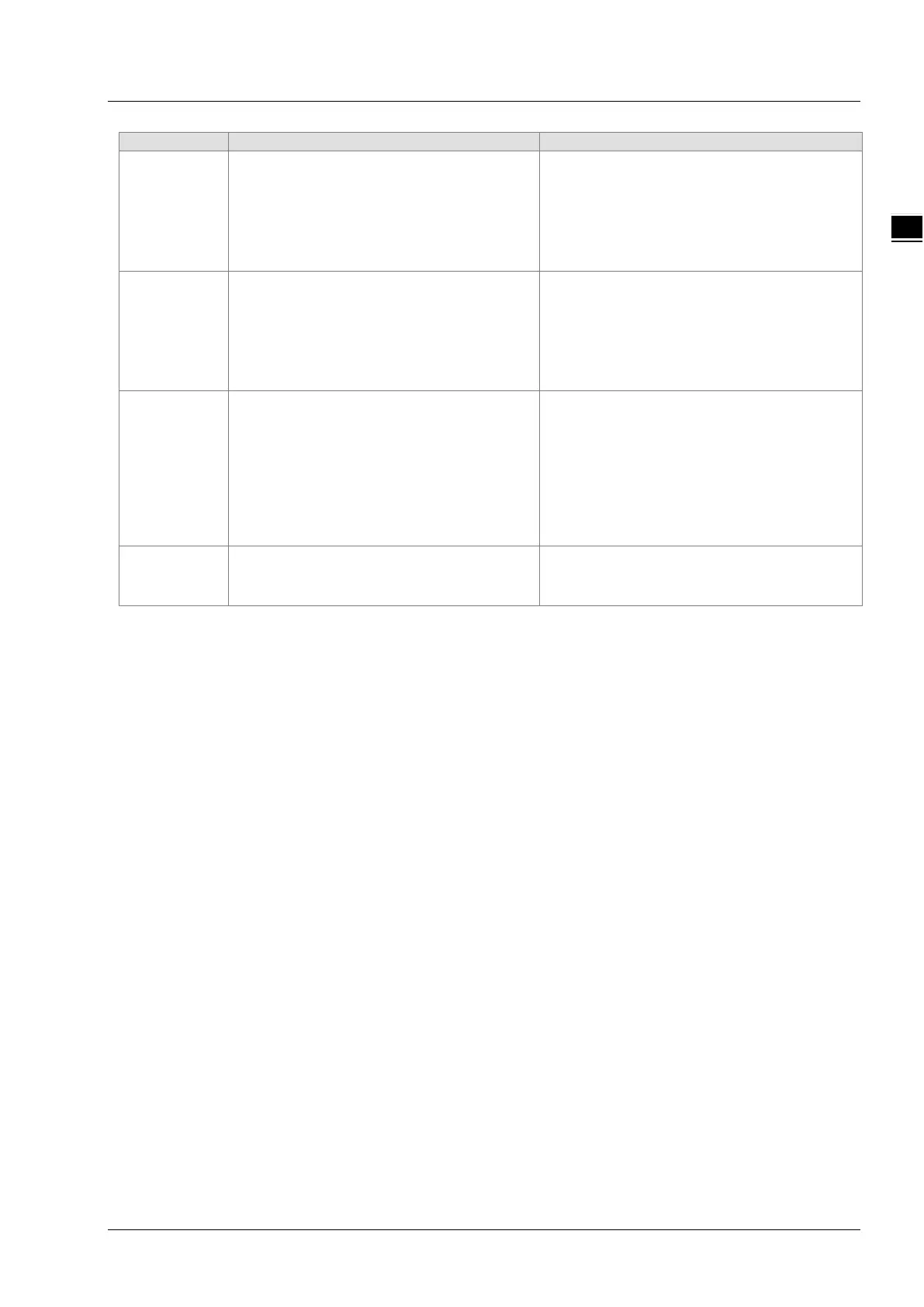
Timing for changing to TRUE
Timing for changing to FALSE
Busy
When Execute changes to TRUE
When the acyclic cam motion is
performed (Periodic=FALSE) and
EndOfProfile changes to TRUE
When Error changes to TRUE
When CommandAborted changes to
Active
When the instruction starts to control
axes
When the acyclic cam motion is
performed (Periodic=FALSE) and
EndOfProfile changes to TRUE
When Error changes to TRUE
When CommandAborted changes to
CommandAb
orted
When the instruction execution is
aborted by other motion instruction
When Execute changes from TRUE to
FALSE
CommandAborted is set to TRUE when
the instruction is aborted by other
instruction after Execute changes from
TRUE to FALSE in the course of the
instruction execution. One period later,
CommandAborted changes to FALSE.
Error
When an error occurs in the instruction
execution or the input parameters for
the instruction are illegal
When Execute changes from TRUE to
FALSE

 Loading...
Loading...








