Chapter 11 Motion Control Instructions
11-293
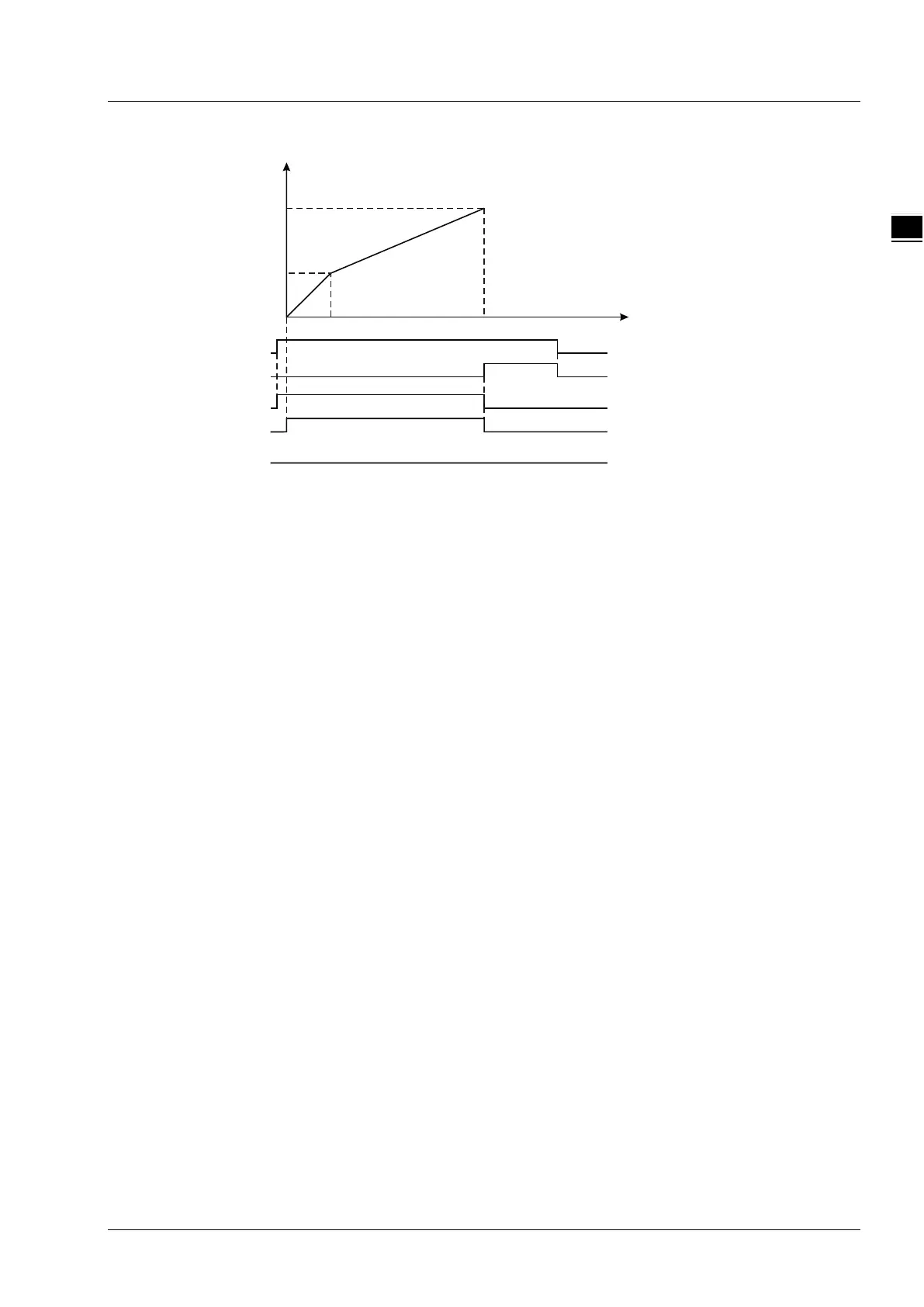
2. Motion Curve
Y axis
1000
X a xis
5200
CC_Ex
CC_Err
CC_Done
CC_Bsy
CC_Act
0
1000
3500
When Pwr_En is set to TRUE, MC_Power instruction is executed to enable two axes. Then
ATG_Ex and ATG1_Ex are set to TRUE and DMC_AddAxisToGroup instruction is executed to
add Axis1 and Axis2 to the axes group Axes1. Afterwards, set SG1_Ex to TRUE to execute
DMC_SetG1Para instruction and set the default velocity of G1/G2/G3. At last, CC_Ex is set to
TRUE and DMC_ CartesianCoordinate instruction is executed to control axis 1 and axis 2 for
the interpolation based on the path planned via G codes.
When CC_Ex changes from FALSE to TRUE, DMC_CartesianCoordinate instruction is
executed. In the same cycle, CC_Bsy changes from FALSE to TRUE. In the second cycle,
CC_Act changes from FALSE to TRUE, the robot will move according to the path planned via
G code. After G code execution is completed, the output CC_Done changes from FALSE to
TRUE and meanwhile CC_Bsy and CC_Act change from TRUE to FALSE.
When CC_Ex changes from TRUE to FALSE, CC_Done changes from TRUE to FALSE.

 Loading...
Loading...








