DVP-15MC Series Motion Controller Operation Manual
11-338
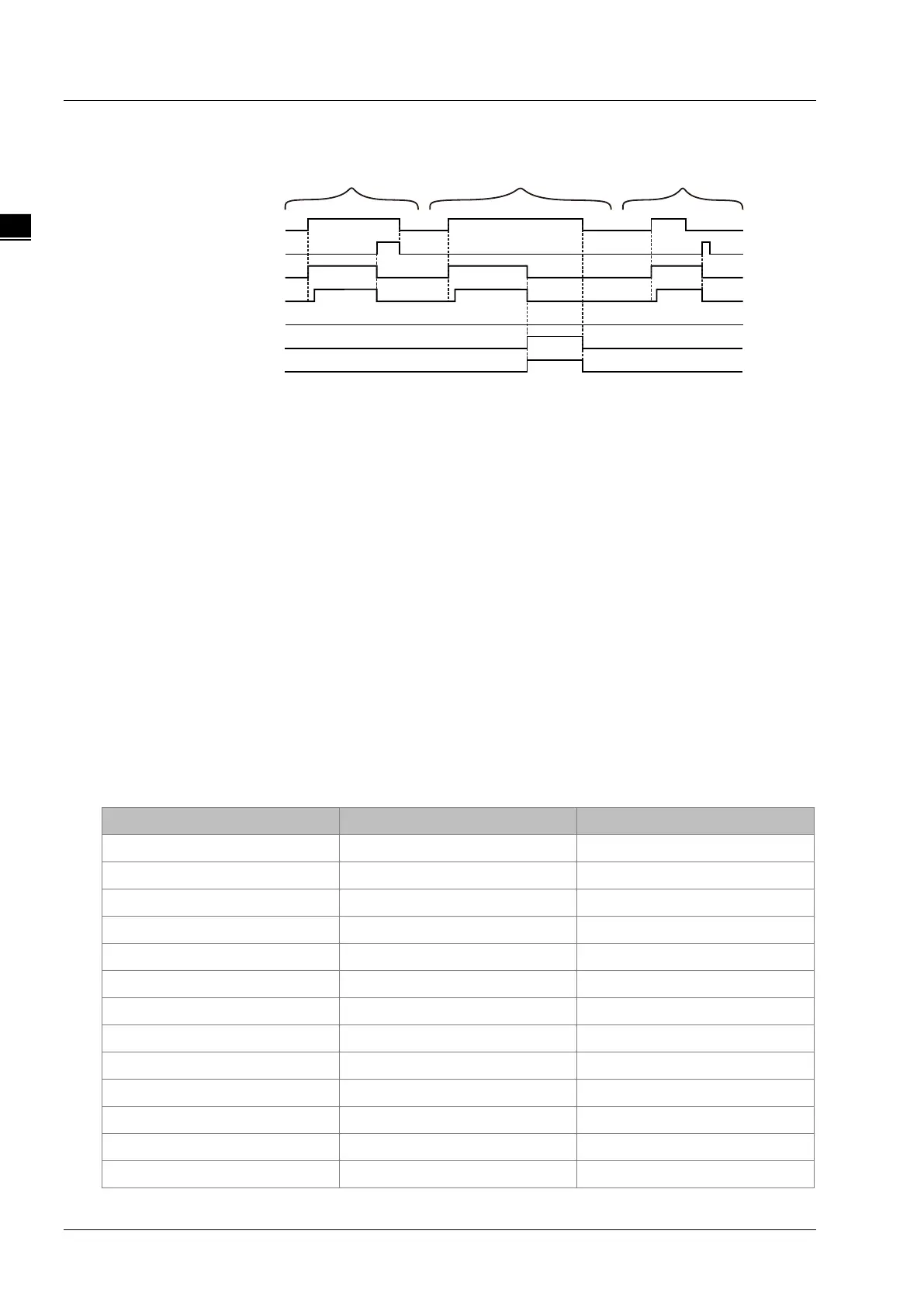
Output Update Timing Chart
Execute
Done
Busy
Active
CommandAbort
Error
Error ID
Case1 Case 2 Case 3
Case 1: When Execute changes from FALSE to TRUE, Busy changes to TRUE. Two cycles later, Active
changes to TRUE. When the axes group reaches the end position, Done changes to TRUE,
Busy and Active change to FALSE.
Case 2: When Execute changes from FALSE to TRUE and an error occurs (such as error in state
machine of the axes group), Error changes to TRUE and ErrorID shows corresponding error
codes and meanwhile Busy and Active change to FALSE. When Execute changes from TRUE
to FALSE, Error changes to FALSE.
Case 3: After Execute changes from TRUE to FALSE in the instruction execution, Done changes to
TRUE when the instruction execution is completed. Meantime Busy and Active change to
FALSE. One cycle later, Done changes to FALSE.
Function
DMC_MoveDirectRelative is used for an axes group to conduct quick positioning and one or more axes
in the axes group can be controlled. The firmware of V1.01 and above supports the function.
Axes are relatively independent with each other during the motion. The velocities, accelerations,
decelerations and jerks of axes depend on the input values of DMC_GroupEnable: MoveDirectVelocity,
MoveDirectAcceleration, MoveDirectDeceleration and MoveDirectJerk.
Programming Example
The example in which one DMC_MoveDirectRelative nstruction is executed is as follows.
1. The variable table and program
Variable name Data type Initial value
ADDAXIS1 DMC_AddAxisToGroup
ADDAXIS1_Ex BOOL
ADDAXIS1_Done BOOL
ADDAXIS1_Bsy BOOL
ADDAXIS1_Err BOOL
ADDAXIS1_ErrID WORD
ADDAXIS2 DMC_AddAxisToGroup
ADDAXIS2_Done BOOL
ADDAXIS2_Bsy BOOL
ADDAXIS2_Err BOOL
ADDAXIS2_ErrID WORD
DMC_GroupEnable0 DMC_GroupEnable
GE_En BOOL

 Loading...
Loading...








