7.5.14 Crushing Prevention Zone Settings
To set the Crushing Prevention Zone, tap the Add button on the Robot Workcell and select
Crushing Prevention Zone > Cuboid, Cylinder, Multi-plane Box, Sphere or Tilted Cuboid. The
safety password is required during setup and enablement.
1 Enter the Workcell Name in the Workcell Name field on the top of the Workcell Setting screen.
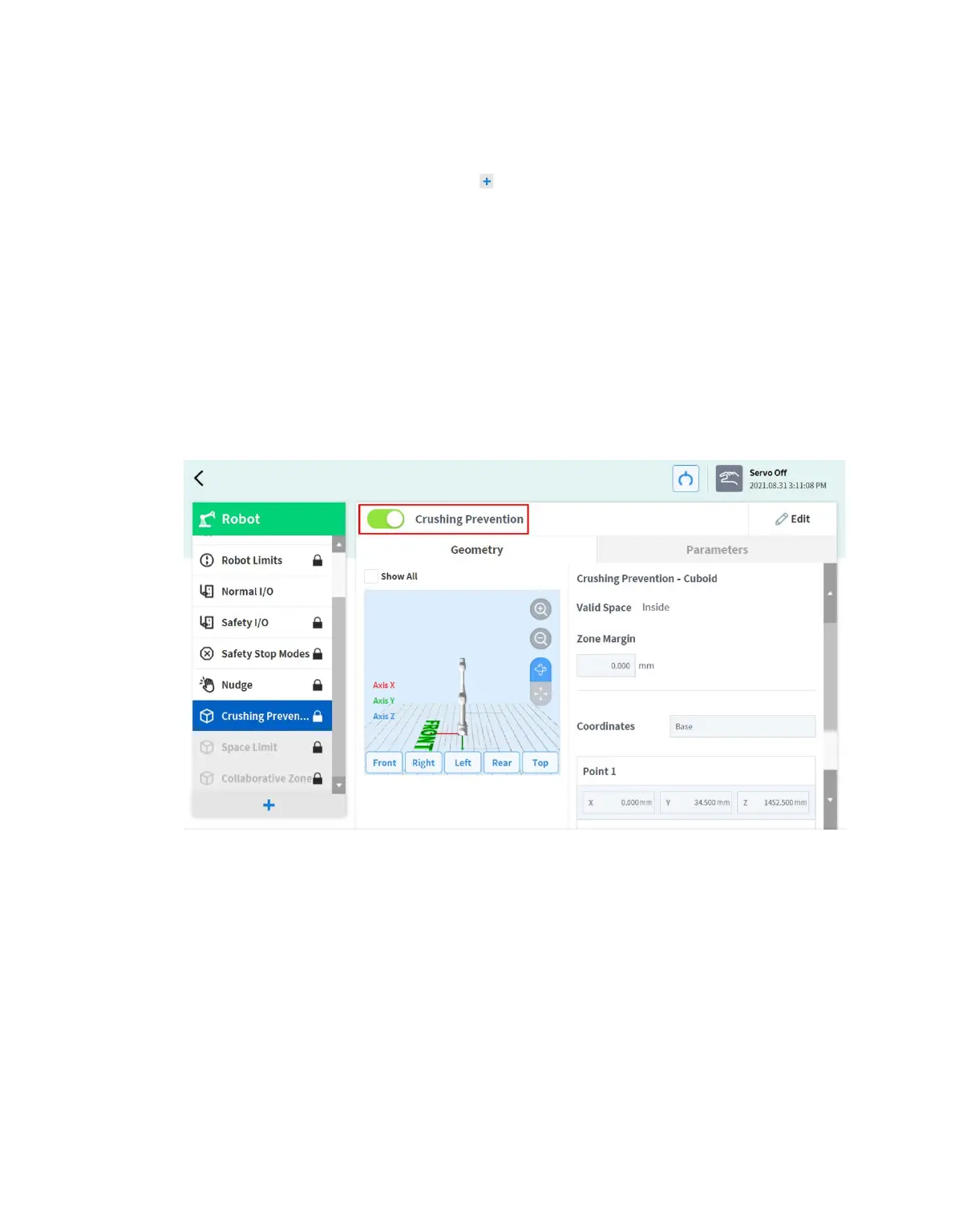
2 Set the pose information according to the Zone shape along with the Valid Space and Zone
Margin in the Geometry tab.
3 Set the TCP/Robot Limits, Safety Stop Modes, Dynamic Zone Enable and Advanced
Options in the Parameters tab, and press Draft.
4 Verify that all parameters displayed are the same as what are Intended to be set, then check
Confirm draft and press Confirm
5 Press the Activate Toggle button to apply the Crushing Prevention Zone.