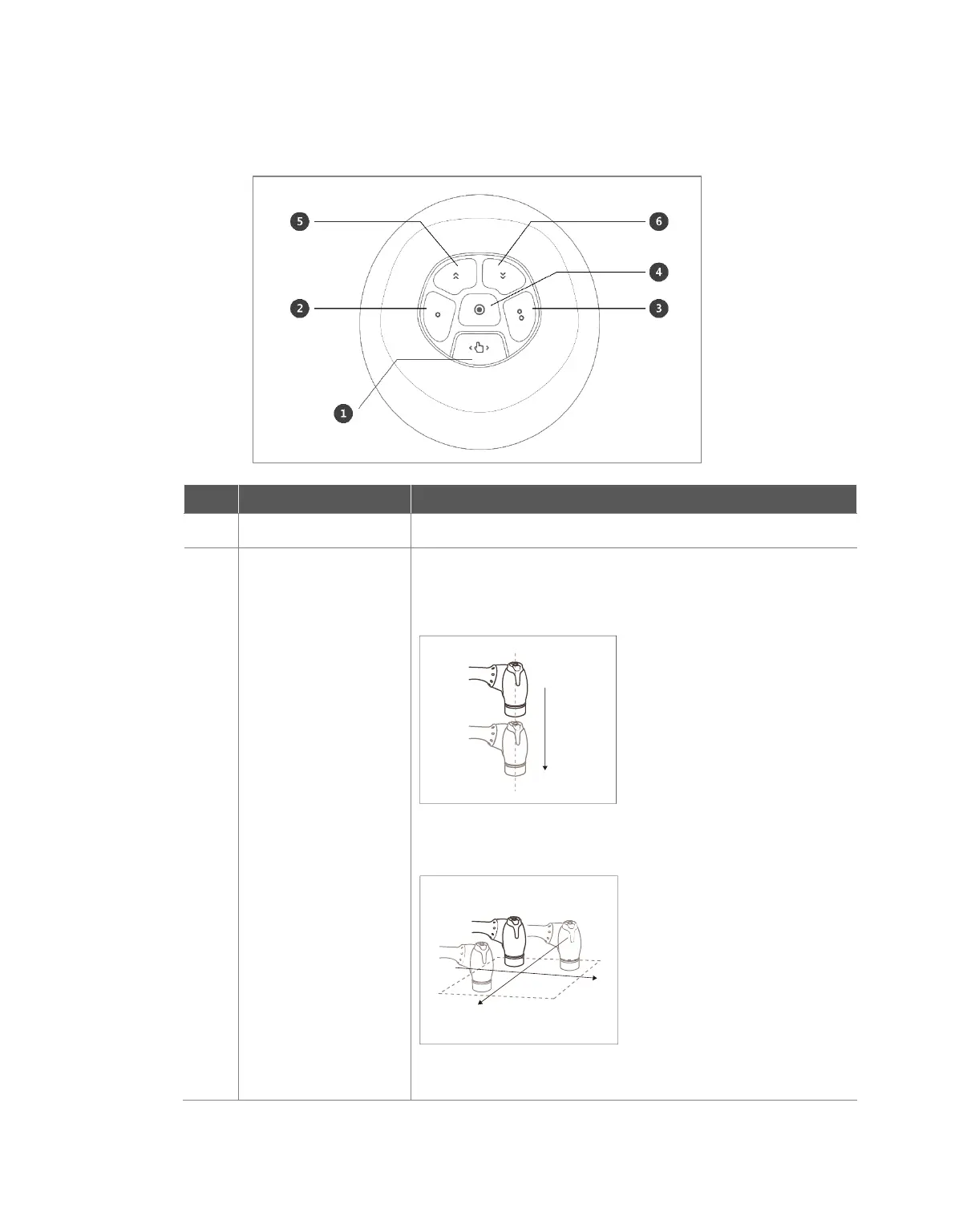
This button can modify the robot’s pose by entering a pose
according to a lock condition corresponding to a mode.
Axis Lock: Changes the pose according to the Z-axis of
the tool coordinates
Surface Lock: Changes the pose according to the X-Y
surface of the tool coordinates
Point Lock: Changes the angle only from the reference