D1-N Series Servo Drive User Manual Tuning
6-24 HIWIN MIKROSYSTEM Corp.
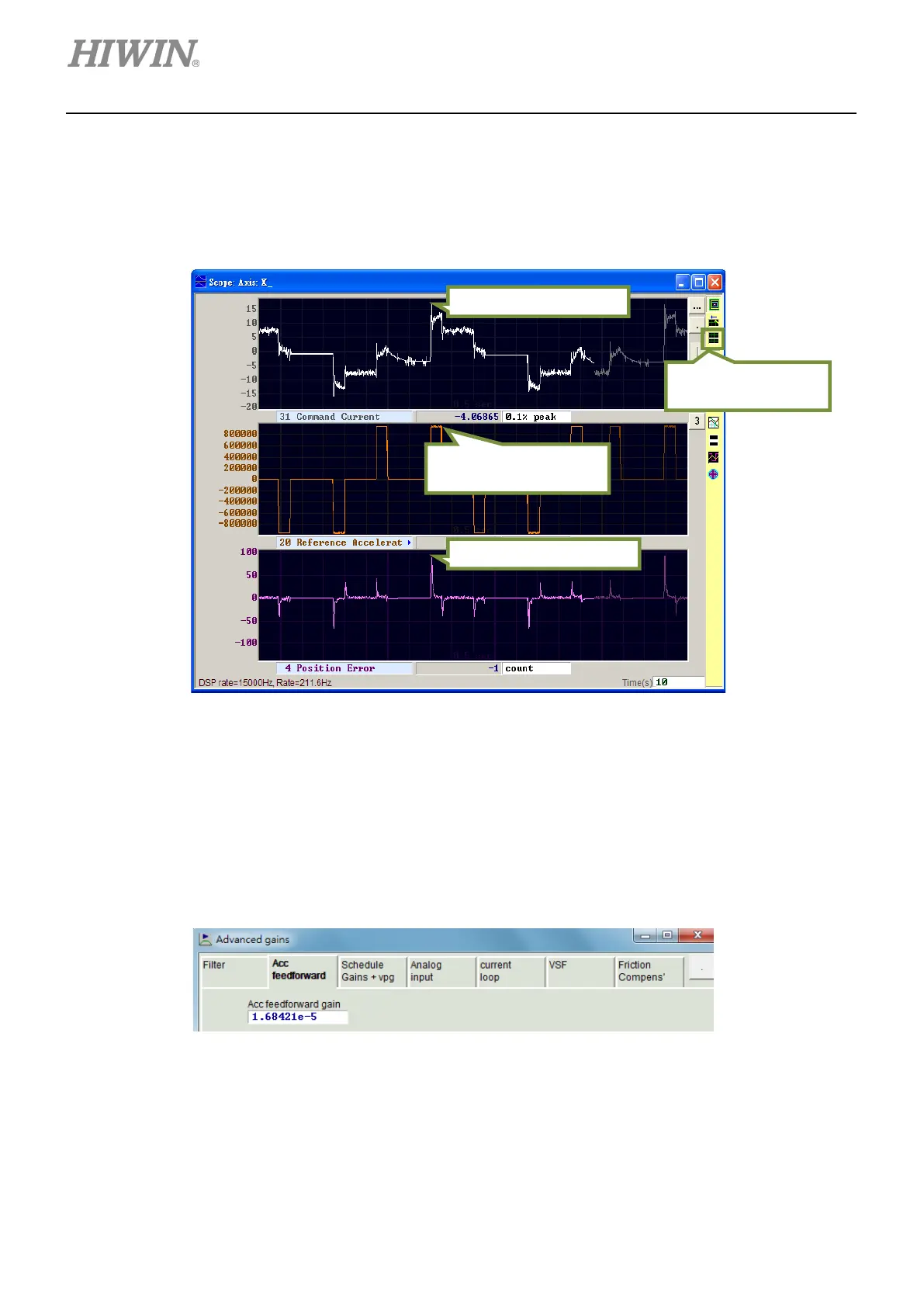
Step 4: Record the maximum command current during acceleration. In figure 6.6.2.2, the maximum
command current is 16. When the motor starts to move, Scope will be as figure 6.6.2.2. Use the
icon indicated in figure 6.6.2.2 to show one physical quantity only. Repeatedly click on the icon
to display the graph of command current, reference acceleration or position error.
Figure 6.6.2.2 The motion trajectory of the motor
Step 5: Record the maximum reference acceleration during acceleration. In figure 6.6.2.2, the
maximum reference acceleration is 950,000 count/s^2.
Step 6: Divide command current by reference acceleration.
Acc feedforward gain = command current/reference acceleration = 16/950,000 = 1.68421e-5
Step 7: Input the result of step 6 into the field of Acc feedforward gain, as figure 6.6.2.3.
Figure 6.6.2.3 Acceleration feedforward gain
Step 8: Observe if the position error has decreased, as figure 6.6.2.4. The position error has decreased
from 90 counts to 65 counts.
Position error is 90 counts.
Reference acceleration is
950,000 count/s^2.
Toggle scopes
windows (Page Up)
 Loading...
Loading...
