D1-N Series Servo Drive User Manual Protection Function
8-6 HIWIN MIKROSYSTEM Corp.
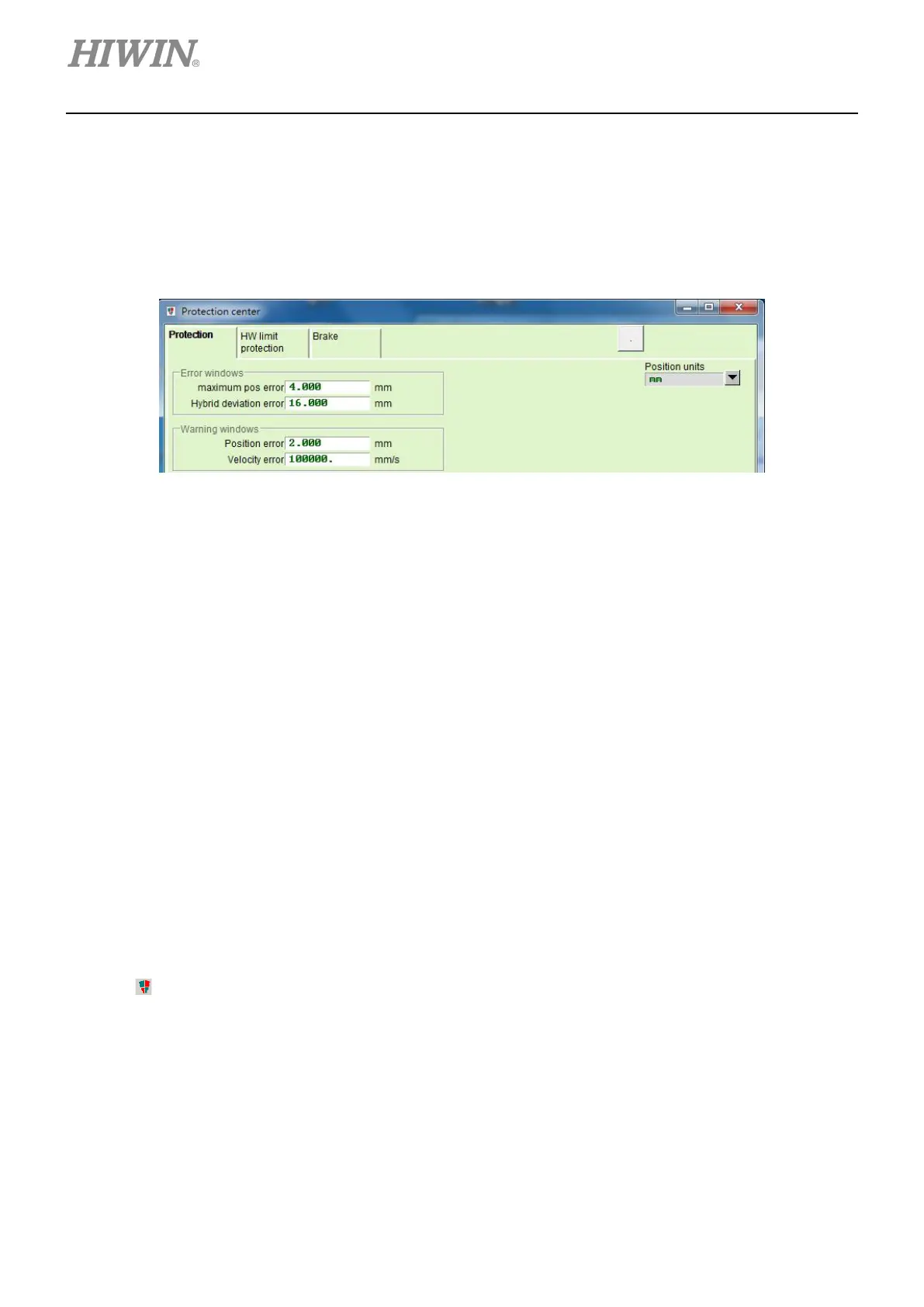
When using models which support dual loop control, users are allowed to set hybrid deviation error in
Protection tab of Protection center to prevent excessive error from causing unstable velocity loop or
position loop. When error exceeds the setting value of hybrid deviation error, error “Hybrid deviation too
big” occurs. If dual loop control is not used, the field of Hybrid deviation error is greyed out and cannot
be set.
Figure 8.2.1.2
8.2.2 Position error warning and velocity error warning
In addition to the position error limit described in section 8.2.1, D1-N servo drive also provides warning
function. When position error or velocity error exceeds the setting in Warning windows, a warning
message will appear in the main window of Lightening to inform users.
8.3 Brake protection
D1-N servo drive supports brake signal output to enable electromagnetic brake to protect motor and
mechanism. This is often used for motor of Z axis. The timing of enabling brake is essential in such
application. When motor moves in Z direction at high speed and the servo drive receives disabling
command and commands the brake to engage directly, a huge vibration may occur and cause damage to
the mechanism. If the motor is disabled too early, the motor and mechanism may possibly slip. Therefore,
D1-N servo drive provides brake parameters to avoid the above situations.
Click on
to go to Protection center. Click on Brake tab to open the setting page for timing diagram of
brake engagement. Click on Set… button to open the setting window of I/O center to set the output pin of
brake signal. The default setting is O4. For setting method of digital output, please refer to section 5.4.2.
When the servo drive receives the disabling command from hardware or software, it will start the following
procedures.

 Loading...
Loading...