D1-N Series Servo Drive User Manual Tuning
HIWIN MIKROSYSTEM Corp. 6-43
Velocity loop
The gains of velocity loop are vpg and vig. vpg is the proportional gain of velocity loop. vig is the
integral gain of velocity loop.
(1) vpg: Adjusting vpg will affect the transient response of velocity loop and increase the bandwidth
of velocity loop.
(2) vig: Adjusting vig will affect the steady-state error of velocity loop. The system may become
unstable if vig is set to be too high.
Position loop
The gain of position loop is ppg. ppg is the proportional gain of position loop.
(1) Adjusting ppg will affect the transient response of position loop and increase the bandwidth of
position loop.
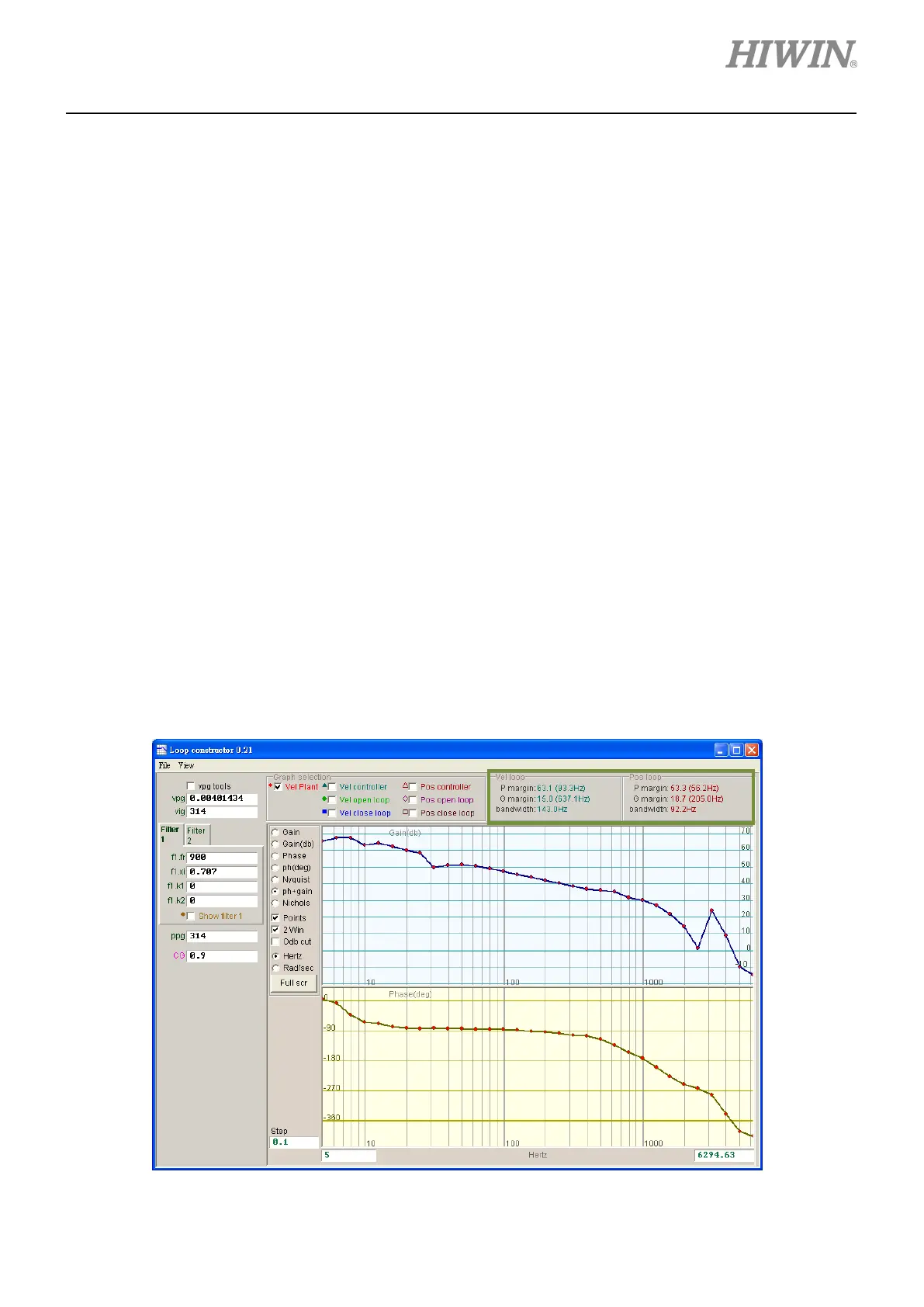
6.7.5 Spectrum analysis
The gain margins, phase margins and bandwidth of velocity loop and position loop are provided in Loop
constructor window for users to adjust gains to simulate the stability of the control system after gain
tuning. In Loop constructor window, P margin means phase margin and G margin means gain margin.
For further information of gain margin and phase margin, please refer to section 3.6.
Figure 6.7.5.1
P margins and G margins in Loop constructor
 Loading...
Loading...
