D1-N Series Servo Drive User Manual Operation Principles
3-6 HIWIN MIKROSYSTEM Corp.
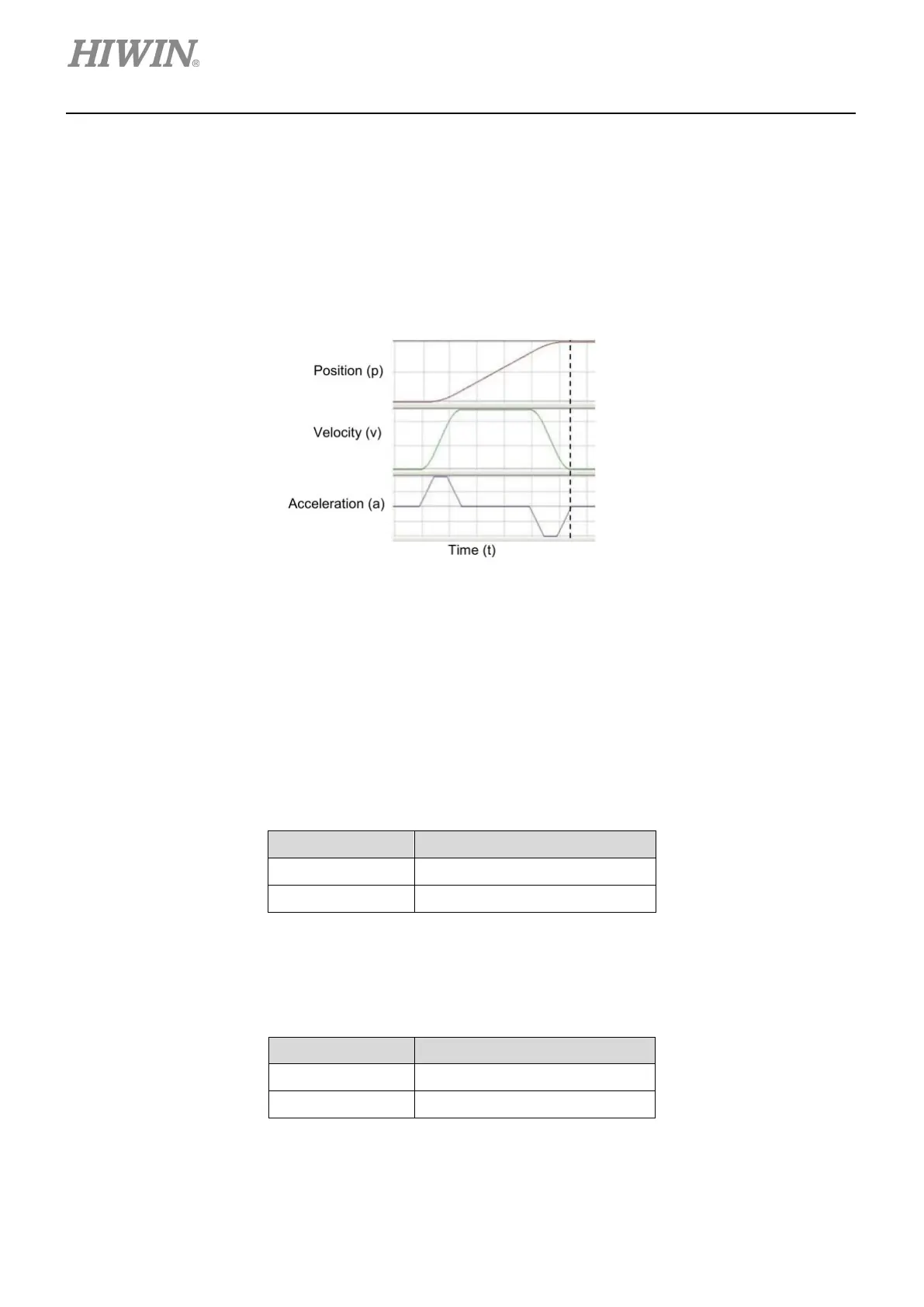
3.4 Path planning
Path planning is usually done by controller. The controller calculates suitable motion commands
according to the required distance, velocity, acceleration and smooth factor. These commands (Pulse
commands or V commands) will be sent from the controller to the servo drive or calculated by the servo
drive (Stand-alone mode).
Figure 3.4.1
(1) Position
Encoder provides the servo drive with current position of motor. Units used for different motion types
are as below. In D1-N servo drive, reference position means position command. Reference position
is calculated from the related parameters by the path generator. Target position is the desired
position set by users or controller. After target position is set, it is calculated by the path generator
before the servo drive commands the motor to move.
Table 3.4.1
Motion Unit
Linear Motion um, mm and m
Rotary Motion Encoder count
(2) Velocity
Velocity is the displacement per unit. Units used for different motion types are as below.
Table 3.4.2
Motion Unit
Linear Motion um/sec, mm/sec and m/sec
Rotary Motion count/sec, rps and rpm
 Loading...
Loading...
