D1-N Series Servo Drive User Manual Tuning
HIWIN MIKROSYSTEM Corp. 6-55
6.10.1 Operational description
To enable signal compensation function for resolver signal, please refer to below.
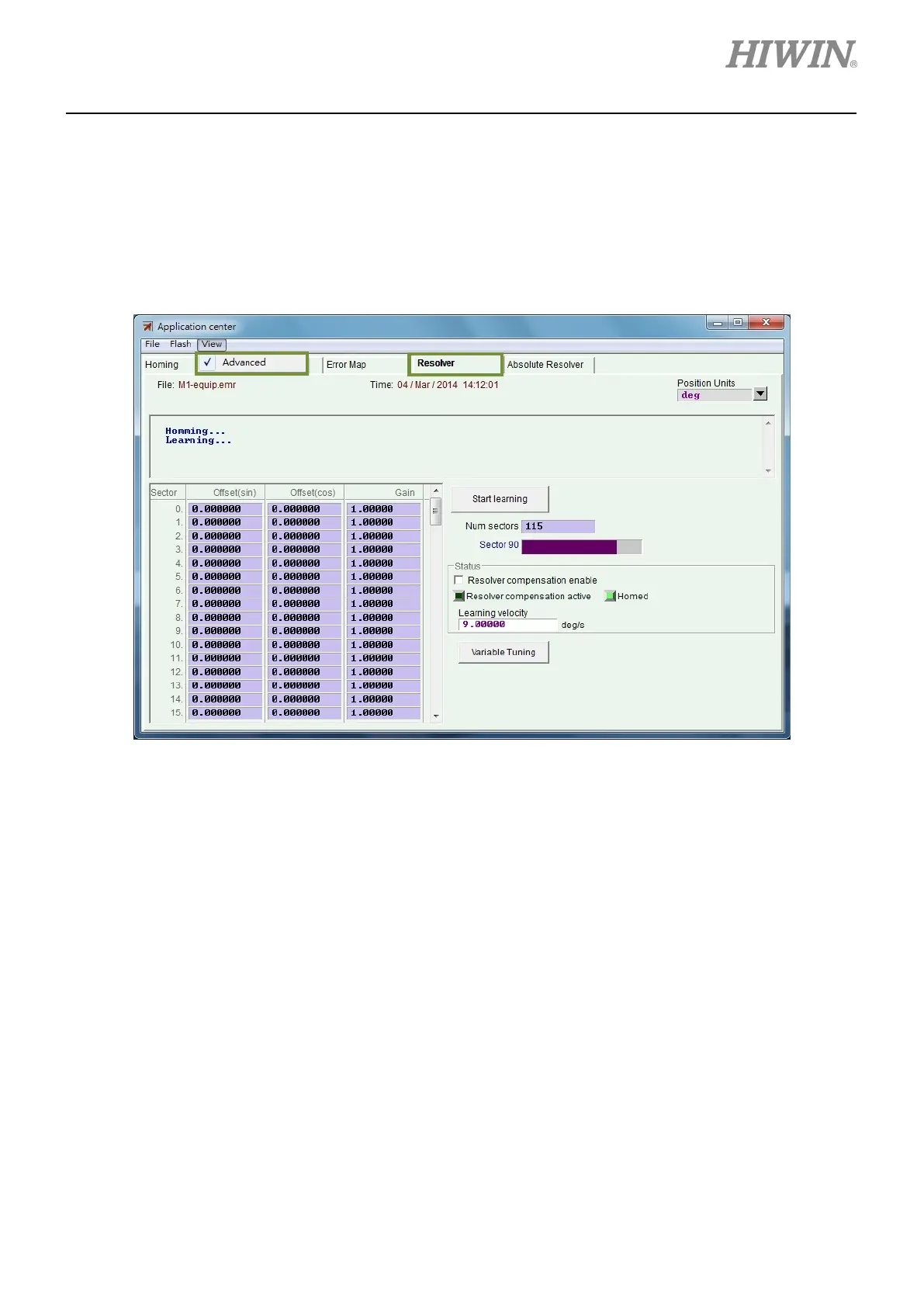
Step 1: Open Application center. Select Advanced from the submenu of View on the menu bar.
Resolver tab appears as figure 6.10.1.1.
Figure 6.10.1.1
Step 2: Set learning velocity. The default setting is 9 deg/s. The suggested setting range is from 9 deg/s
to 18 deg/s.
Step 3: Click on Start learning button to create signal compensation table. The motor starts homing,
and then the signal compensation table will be created. After the signal compensation table is
created, the motor moves to the home position again. This may take around two to four
minutes. After homing completes, message “go back home ok.” appears, as figure 6.10.1.2.
 Loading...
Loading...
