D1-N Series Servo Drive User Manual Tuning
6-20 HIWIN MIKROSYSTEM Corp.
Natural logarithm
Click on
to display the values of X axis in logarithmic form. The function is only available after
fast Fourier transform completes.
6.6 Advanced gain tuning
Reduced time of move and settling, small position error and smooth velocity are often preferred when
performing servo control via servo drive. The performance can be improved by gain and parameter
tunings. For D1-N servo drive, the simplest way to enhance the performance of the motor is to adjust
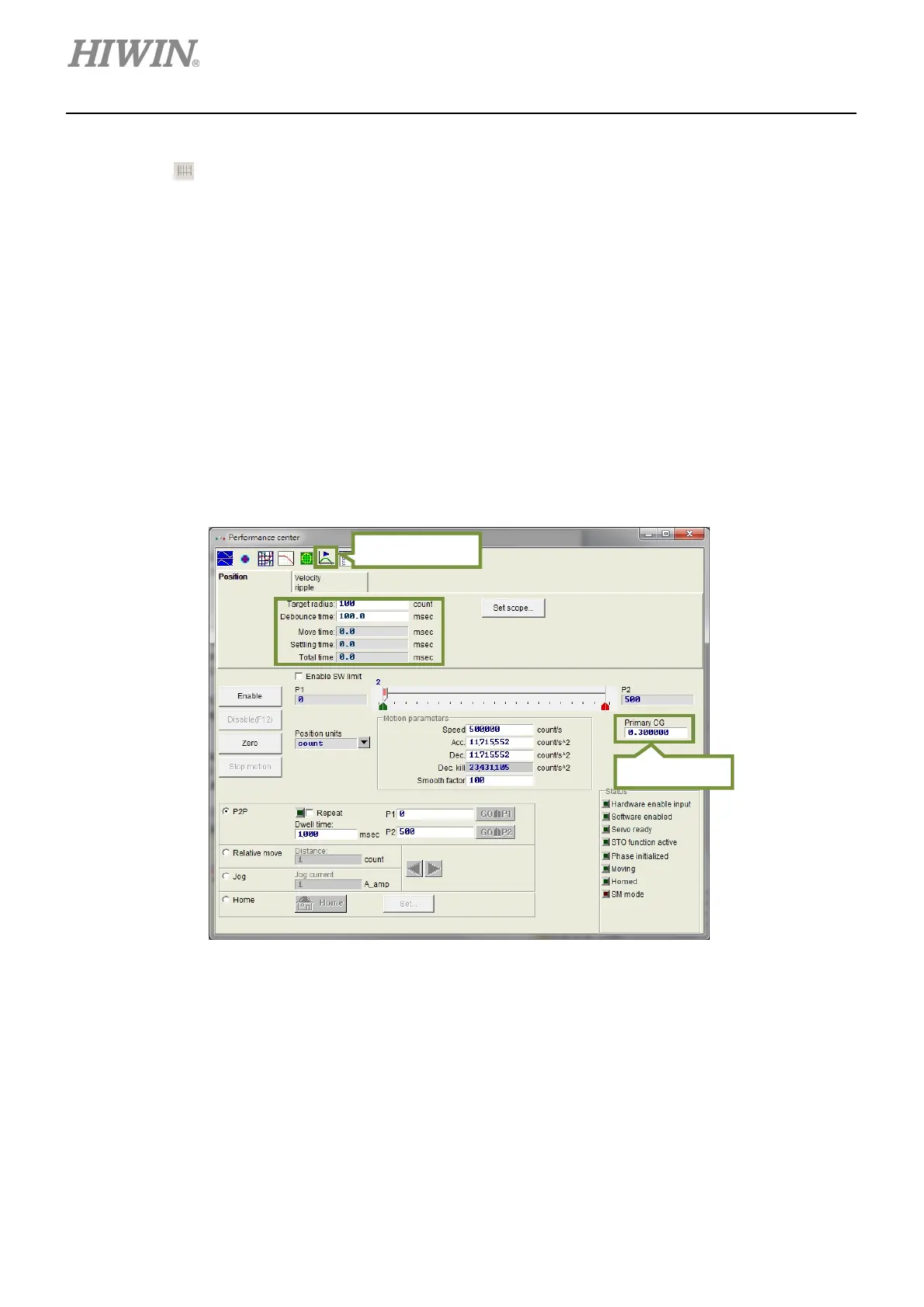
common gain (Primary CG). The greater the common gain is, the stronger the servo stiffness is.
However, if servo stiffness is too strong, system vibration or electrical noise may occur. These
phenomena may vary with mechanism.
Figure 6.6.1 Performance center
If the desired performance cannot be achieved by simply adjusting common gain, D1-N servo drive also
provides advanced gains for advanced tuning, including filter, acceleration feedforward (Acc
feedforward), schedule gains and velocity loop gain (Schedule Gains + vpg), analog input and current
loop.
 Loading...
Loading...
