D1-N Series Servo Drive User Manual Servo Drive Configuration
5-34 HIWIN MIKROSYSTEM Corp.
(6) Set and confirm the current setting for enabling. Set the required current (Unit: ampere (A)) for test
run in SM mode in Current (SM mode) field. The setting value should be just enough for motor to
move and does not exceed the default setting value which is 95% of the continuous current of the
motor.
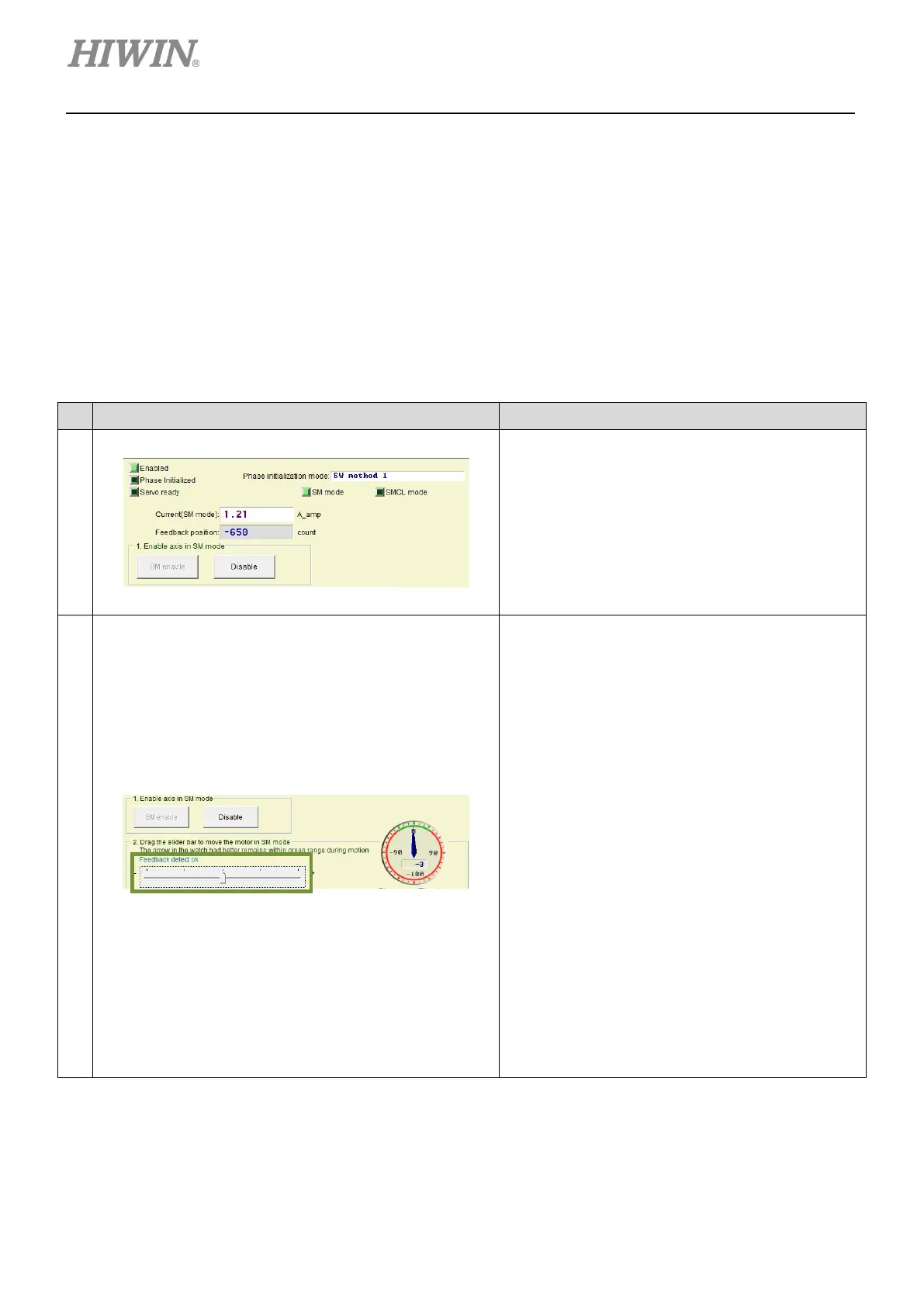
5.3.2 Operating procedures for auto phase initialization
The operating procedure of phase initialization mode SW method 1 is as below.
Step
Figure Description
1
Enabling the motor in SM mode:
Click on SM enable button and Enabled indicator
becomes green.
Note:
(1)
Enable the motor in SM mode. The servo drive
outputs current according to
Current (SM mode) field. To avoid overheating, the
motor cannot be enabled for a long time in SM
mode.
(2) Enabling signal must be input from the controller.
2
Test moving direction in SM mode:
Drag the slider bar leftward and rightward to move
the motor. The motor moves in forward direction
when dragging the slider bar rightward. The motor
moves in reverse direction when dragging the
slider bar leftward.
Normally the pointer of Phase error (Elec deg)
indicator should be between -
degrees (the range colored in green). After moving
the motor by the slider bar, the message
“Feedback detect ok” appears. Then users can
proceed to next step. If the pointer moves
randomly, release the slider bar and drag the slider
bar to move the motor again.
Note:
(1) If the pointer still moves randomly after moving the
motor by the slider bar again, please check the
following items:
The motor power cable and the encoder cable
are correctly connected.
The setting of encoder
encoder resolution or pole pair number could be
incorrect. Go to Configuration center and check
again.
(2) Enabling signal must be input from the controller.
 Loading...
Loading...
