D1-N Series Servo Drive User Manual Tuning
6-42 HIWIN MIKROSYSTEM Corp.
Figure 6.7.3.2.1
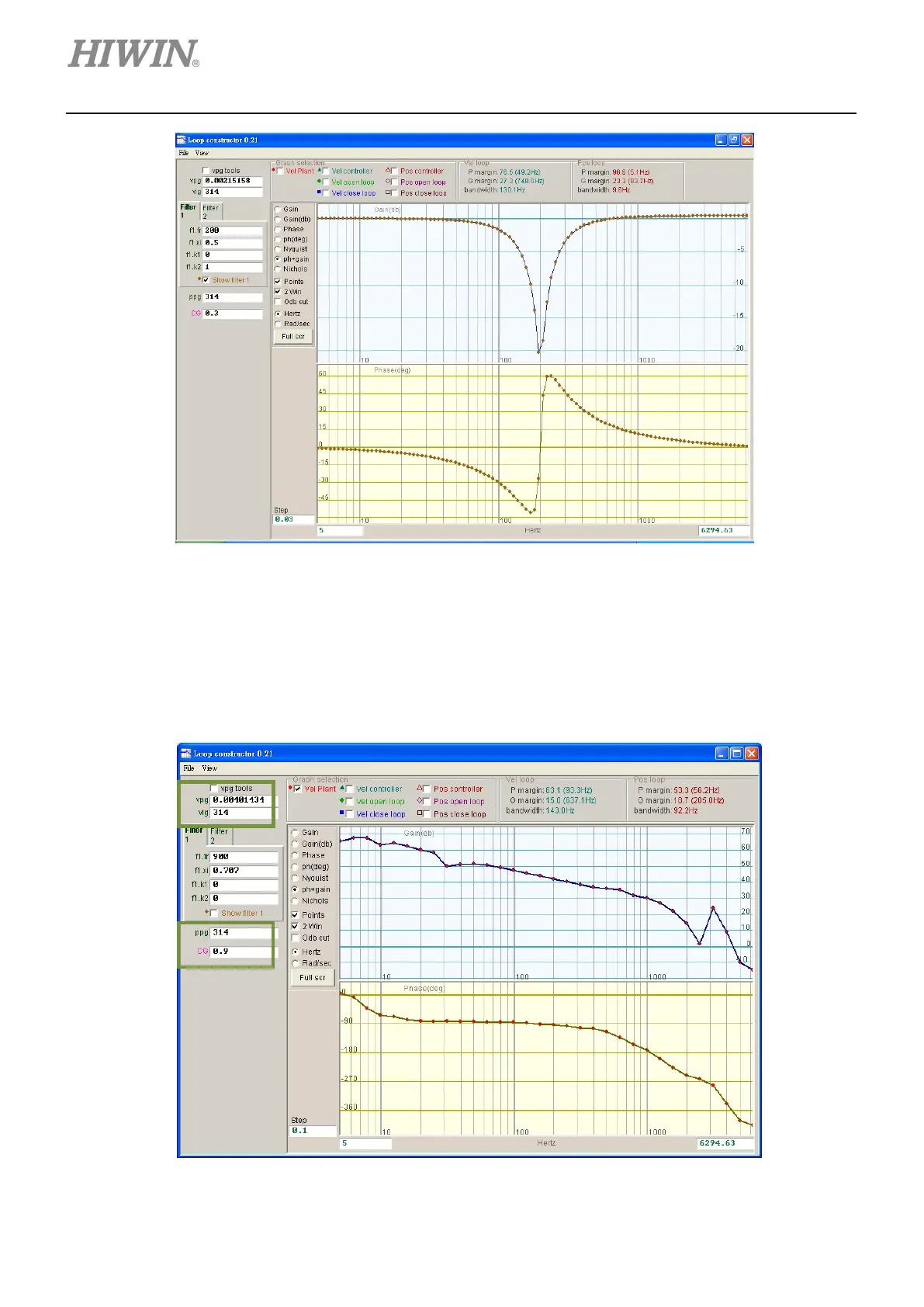
6.7.4 Gain tuning
Loop constructor allows users to adjust velocity loop gains (vpg and vig), position loop gain (ppg) and
common gain (CG) to simulate the stability of the control system after gain tuning.
Figure 6.7.4.1 Gain tuning in Loop constructor
 Loading...
Loading...
