D1-N Series Servo Drive User Manual Tuning
HIWIN MIKROSYSTEM Corp. 6-25
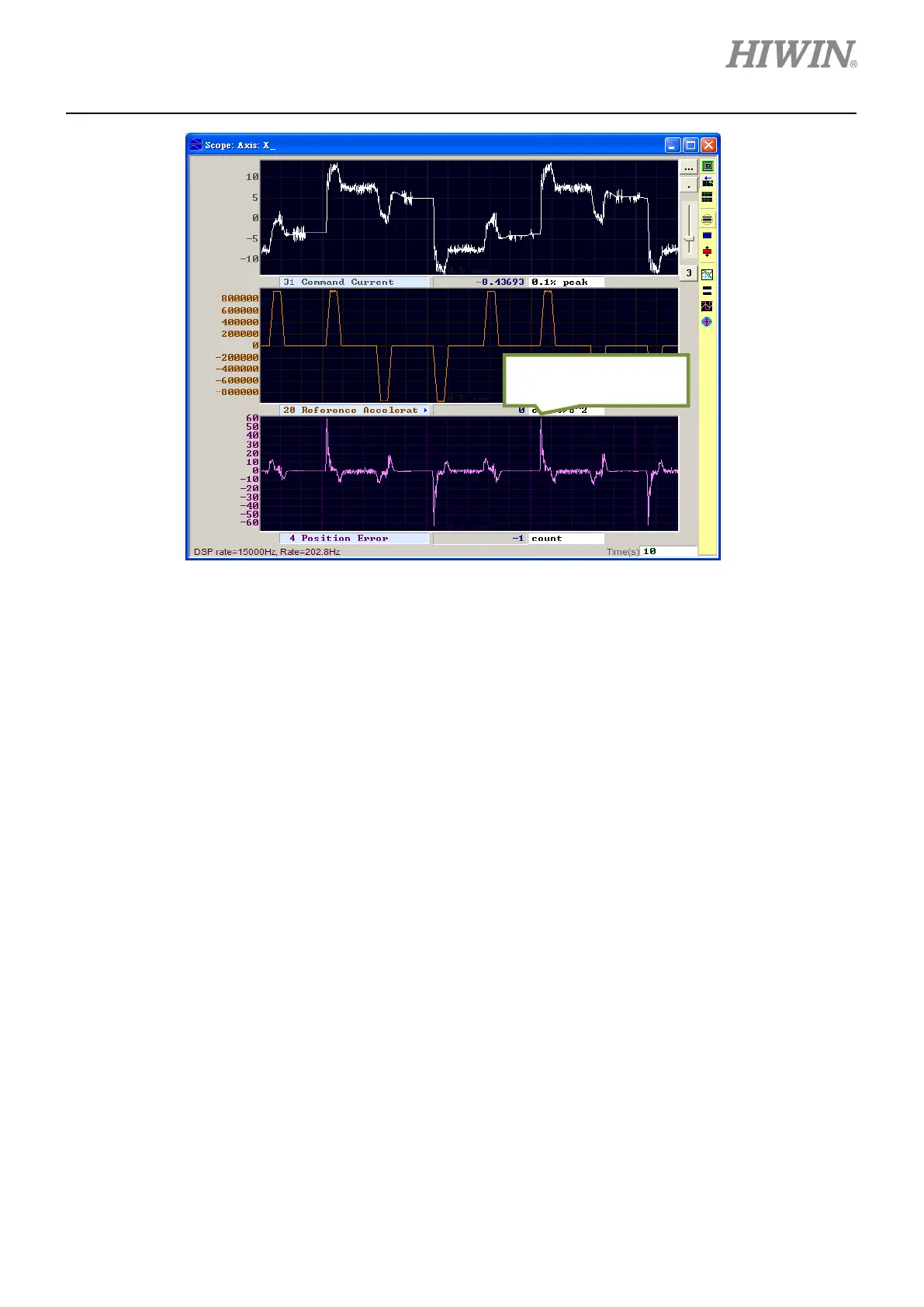
Figure 6.6.2.4 After adding acceleration feedforward gain
6.6.3 Schedule gains and velocity loop gain
Schedule gains
A complete motion can be divided into three phases. (Refer to section 3.7)
(1) Move: From the start to the end of path planning
(2) Settling: From the end of path planning to in-position
(3) In-position: In-position signal is sent.
Schedule gains are used to adjust the gains of different phases (Move, Settling and In-position).
Gains will be adjusted in proportion to common gain (CG). When the setting is 1, it means the original
common gain (CG) will be used. When the setting is less than 1, it means the gain is decreased. The
corresponding parameter of each phase is listed below.
(1) Moving: X_sg_run
(2) Settling: X_sg_stop
(3) In position: X_sg_idle
If common gain (CG) is set to 0.5 and X_sg_run is set to 1.2, the gain will be changed to 0.5*1.2 =
0.6, when motor is moving. Schedule gain can help to change gain to fit different phase.
decreased to 65 counts.
 Loading...
Loading...
