D1-N Series Servo Drive User Manual Operation Principles
3-12 HIWIN MIKROSYSTEM Corp.
3.7 Move and settling
Motor moves according to the path planned by controller. When motor arrives at target position, it is able
to accurately position and stop. This is called move and settling.
(1) Position error
In a servo system, there is certain difference between target position and encoder feedback position.
This difference is called position error.
(2) Target radius
After motor arrives at target position, the difference between encoder feedback position and target
position must be controlled in a specific range. This range is called target radius.
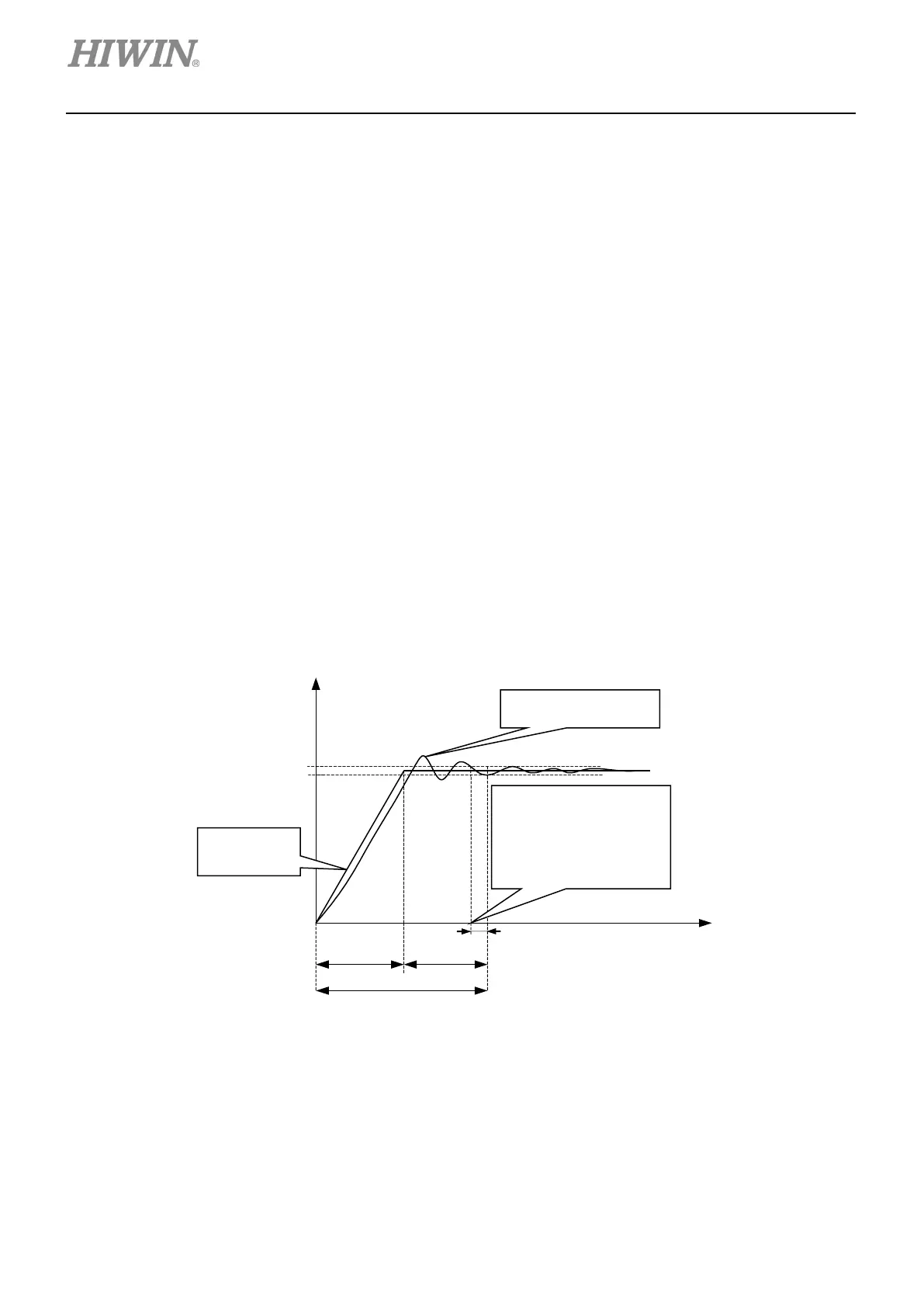
(3) Total time of move and settling
As figure 3.7.1, after the motor arrives at target position and position error is within target radius for a
period of time (Debounce time), in-position signal is ON. Then the motor is regarded as in-position. If
position error is not within target radius, the motor will not be regarded as in-position. Total time
(Total time is the time when the motor starts to move to the time settling completes.) is the sum of
move time and settling time.
Figure 3.7.1
position
ON, after position
error is in target radius
for a period of time
 Loading...
Loading...
