D1-N Series Servo Drive User Manual Operation Principles
3-2 HIWIN MIKROSYSTEM Corp.
3.1 Operation mode
D1-N servo drive supports the following operation modes.
(1) Position mode
(2) Velocity mode
(3) Force/torque mode
(4) Stand-alone mode
Each operation mode will be described in the following sections.
3.1.1 Position mode
In position mode, controller sends pulses to the servo drive. These pulses are position commands. When
a pulse is received, the servo drive commands the motor to run a corresponding distance. Path planning
is done by the controller. At what speed the motor runs is decided by the sending frequency of pulses.
The motor runs at faster speed as pulses are sent at faster speed; the motor runs at constant speed as
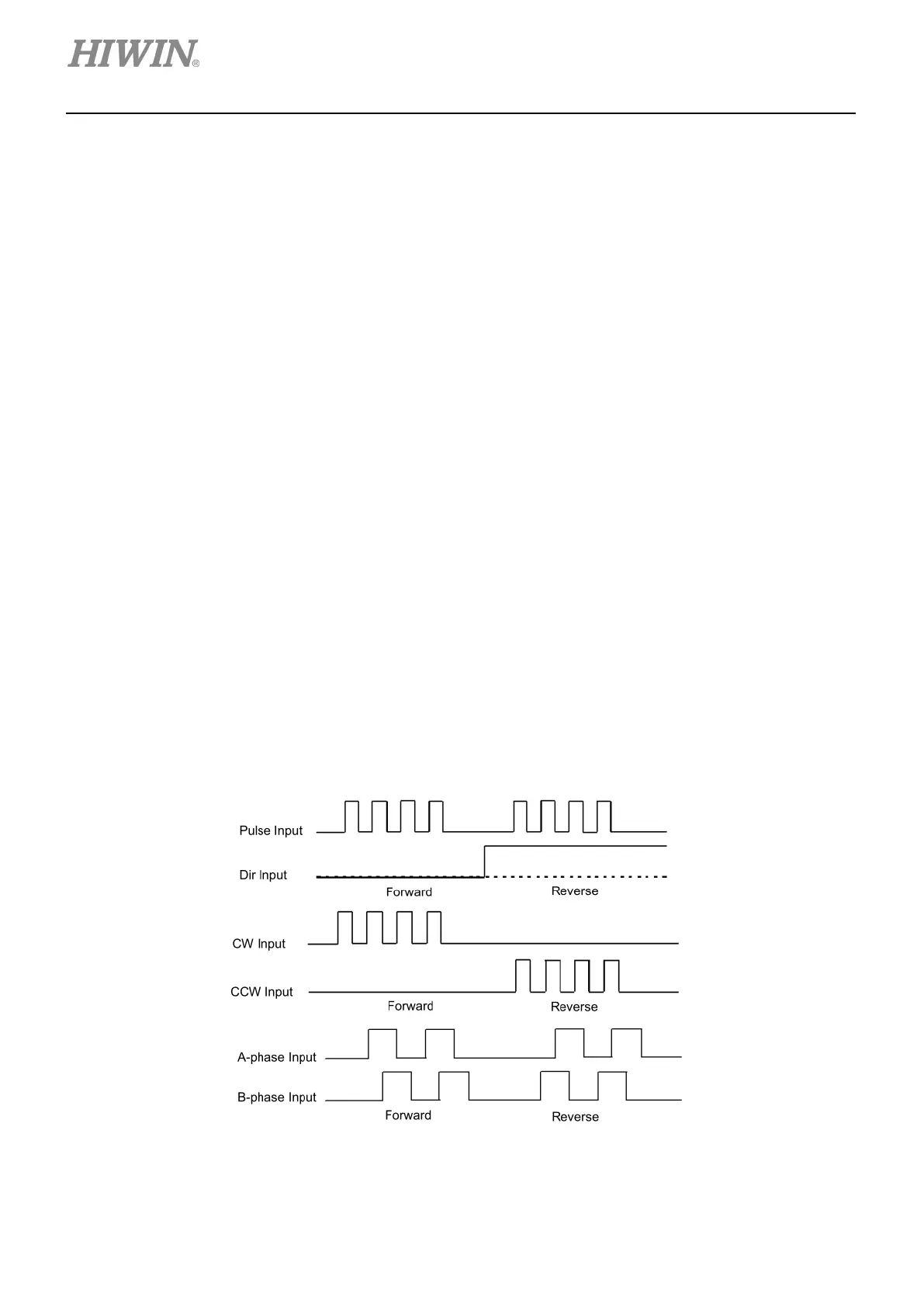
pulses are sent at fixed speed. As figure 3.1.1.1, three pulse formats are supported: Pulse/Direction
(Pulse/Dir), Pulse up/Pulse down (CW/CCW) and A/B phase (AqB). By different wirings, pulse signals
can be classified into TTL differential signals and single-ended signals. Users can set electronic gear ratio
in position mode. Normally one pulse is equivalent to one encoder count. For instance, when the
electronic gear ratio is set to 2:3, it means two pulses is equivalent to three encoder counts.
Figure 3.1.1.1
 Loading...
Loading...
