D1-N Series Servo Drive User Manual Protection Function
HIWIN MIKROSYSTEM Corp. 8-7
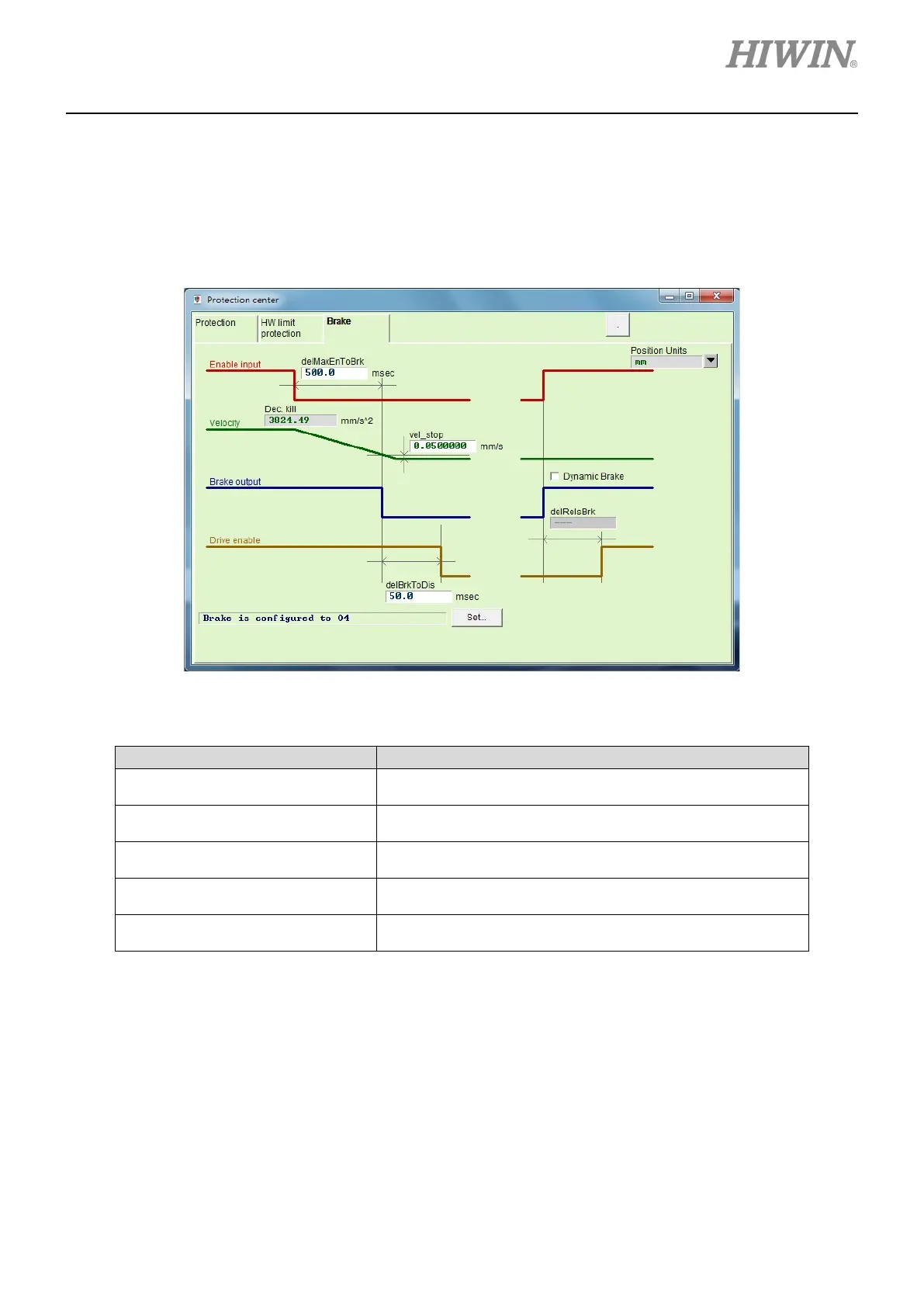
Step 1: When the servo drive receives disabling command, the brake engages after the delay time set
in delMaxEnToBrk. If the velocity of the motor is less than the value set in vel_stop, the brake
also engages.
Step 2: Then after the time set in delBrkToDis, the motor is disabled.
Figure 8.3.1
Table 8.3.1
Delay Time for Brake Engagement
(delMaxEnToBrk)
Maximum time from the time when disabling command is
received to the time when brake engages.
Deceleration of Emergency Stop
(Dec. kill)
Deceleration of motor brake when emergency stop is
activated. Refer to section 8.1.
Velocity for Brake Engagement
(vel_stop)
After disabling command is received, the motor needs to
reach this velocity for brake to engage.
Brake Engagement Time
(delBrkToDis)
Delay time from the time when brake engages to the time
post-stage circuit is shut down.
Dynamic Brake Relay Delay Time
(delRelsBrk)
The delay time to the completion of dynamic brake relay
switching after brake disengages.
If the servo drive is connected to dynamic brake, in disabling state, the motor connects to brake resistor
for braking. In enabling state, the motor needs to connect to the servo drive for enabling. The switch
between the above two operation is done by relay. Therefore, the servo drive needs to wait for the motor
to switch from the brake resistor to the servo drive before enabling. If the servo drive tries to enable the
motor before it connects to the servo drive, error “Motor maybe disconnected” may occur. To avoid this
problem, when dynamic brake is connected, check the checkbox of Dynamic Brake and set proper delay
time for relay.

 Loading...
Loading...