D1-N Series Servo Drive User Manual Protection Function
HIWIN MIKROSYSTEM Corp. 8-3
Table 8.1.2
Speed
Set the maximum speed of motor during
motion.
Linear motor: 100 mm/s
Torque motor: Rated speed
Acc.
Set the maximum acceleration of motor
during motion.
Linear motor: 1/10 × (K
f
× I
p
/ Moving Mass)
*1
Torque motor: 1/2 × (K
t
× I
p
/ (10 × J
m
))
*2
Dec.
Set the maximum deceleration of motor
during motion.
Linear motor: 1/10 * (K
f
× I
p
/ Moving Mass)
*1
Torque motor: 1/2 × (K
t
× I
p
/ (10 × J
m
))
*2
Dec. kill The deceleration of emergency stop
Linear motor: 10 × Acc.
Torque motor: 2 × Acc.
Smooth
factor
Smooth factor
Linear motor: 100
Torque motor: 100
Note:
(1)
*1
The maximum default setting of Acc. and Dec. of linear motor is 2 G.
(2)
*2
J
m
is the moment of inertia obtained from inertia estimation.
As figure 8.1.1, the maximum speed, maximum acceleration and maximum deceleration of motion
can be set in the setting area of Motion parameters. Users can select preferred unit from the
drop-down list of Position units. These settings are used for test run.
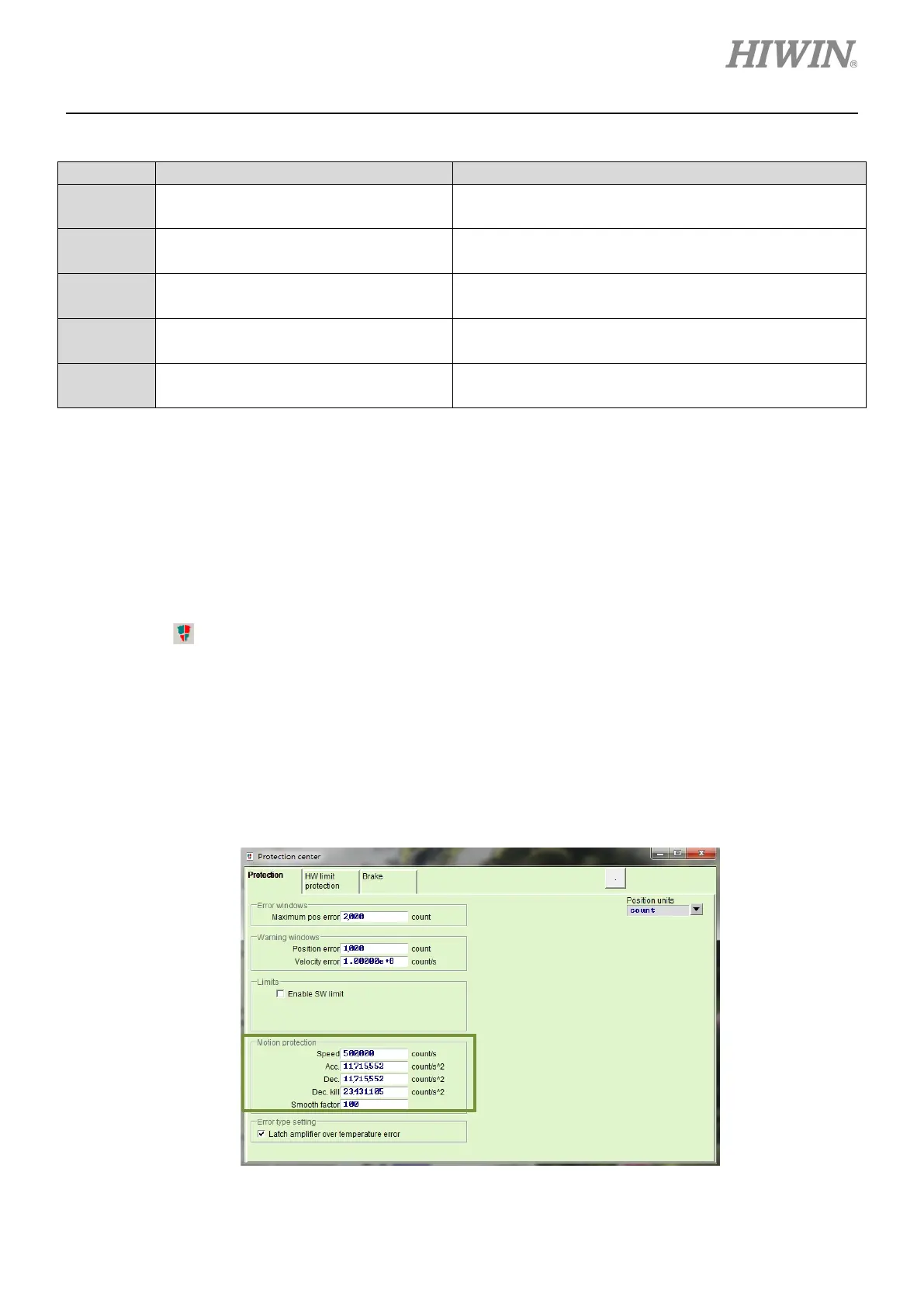
Click on
to go to Protection center. Motion protection parameters, including Speed, Acc., Dec.
and Dec. kill can be set in the setting area of Motion protection in Protection tab. When the setting
values in Motion parameters exceed the setting values in Motion protection, the setting values in
Motion parameters will be automatically replaced by the ones in Motion protection during
operation. In position mode or velocity mode, multiply the setting values of Acc. and Dec. by 10 so
the performance will not be limited by motion protection function. If not, the performance could be
limited.
Figure 8.1.2

 Loading...
Loading...