10 JVL Industri Elektronik A/S - User Manual - Integrated Stepper Motors MIS23x, 34x, 43x
1.3 General description
The QuickStep motors are currently available in 6 different models divided in 2 families.
NEMA23 covers: MIS231, MIS232 and MIS234, with holding torque ratings from 1.1 to
3.0 Nm and NEMA34 covers: MIS340, 341 and 342. The basic functions and I/O features
are the same for all models. MIS43x models up to 25.0 Nm are under development.
1.3.1 Basic modes/functions in the QuickStep motor
The QuickStep motor offers the following functions:
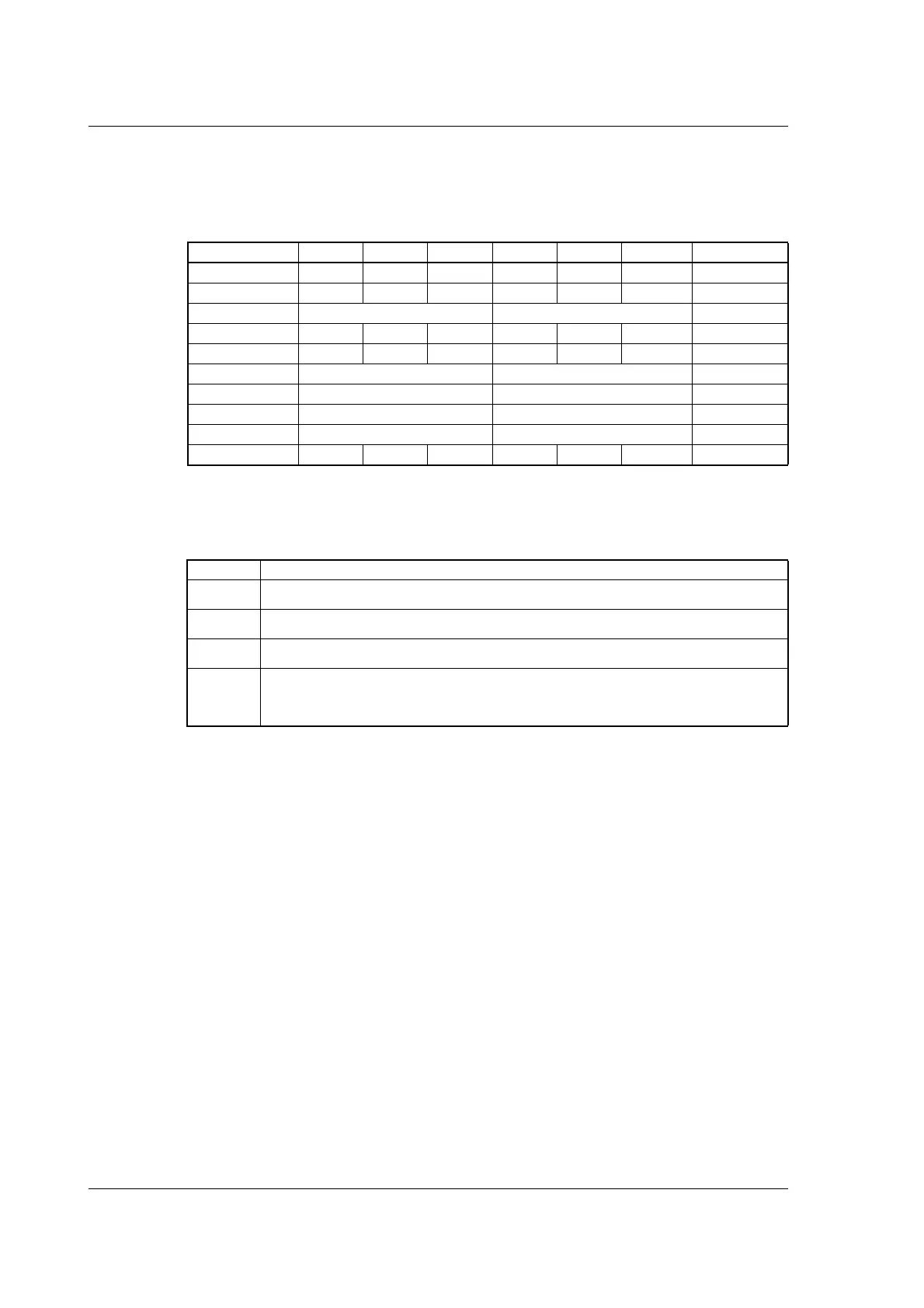
Motor Type MIS231 MIS232 MIS234 MIS340 MIS341 MIS342 Unit
Holding Torque 1.1 1.6 2.9 3.0 6.1 9.0 Nm
Inertia 0.3 0.48 0.96 1.4 2.7 4.0 kgcm
2
Flange NEMA23 (57x57 mm.) NEMA34 (87x87 mm) -
Length 96 118.5 154 9[3.74] 126[4.96] 156.0[6.14] mm [Inch]
Shaft Ø 6.35 6.35 10.0 9.53 14.0 14.0 mm
Shaft radial play Max. 0.02 (450g load) Max. 0.02 (450g load) mm
Shaft axial play Max. 0.08 (450g load) Max. 0.08 (450g load) mm
Max radial force 7.5 (20mm from flange) 22 (20mm from flange) kg
Max axial force 1.5 6 kg
Weight 0.9 1.2 1.8 2.7 4.2 5.8 kg
Mode Description
Passive
The motor will be in a completely passive state but communication is active and internal
registers can be setup. Motor shaft can be turned by hand.
Velocity
The motor velocity can be controlled using MacTalk software or by setting register 5 (V_SOLL)
using serial or program commands.
Position
The motor position can be controlled using MacTalk or by setting register 3 (P_SOLL) using
serial or program commands.
Gear
The motor position and velocity can be controlled by pulse and direction or encoder signals
at the inputs “IN1” and “IN2”.
The gear ratio can be set to a large ratio by using register 14 (GEAR1) and register 15
(GEAR2).

 Loading...
Loading...