JVL Industri Elektronik A/S - User Manual - Integrated Stepper Motors MIS23x, 34x, 43x 321
16.4 Command timing
Each command has a certain execution time. The specified execution time in the
following table is the maximum execution time if not using CANopen, serial com-
munication and the motor is disabled. The actual execution may be faster.
1) The time for all move commands is shown without waiting for in position
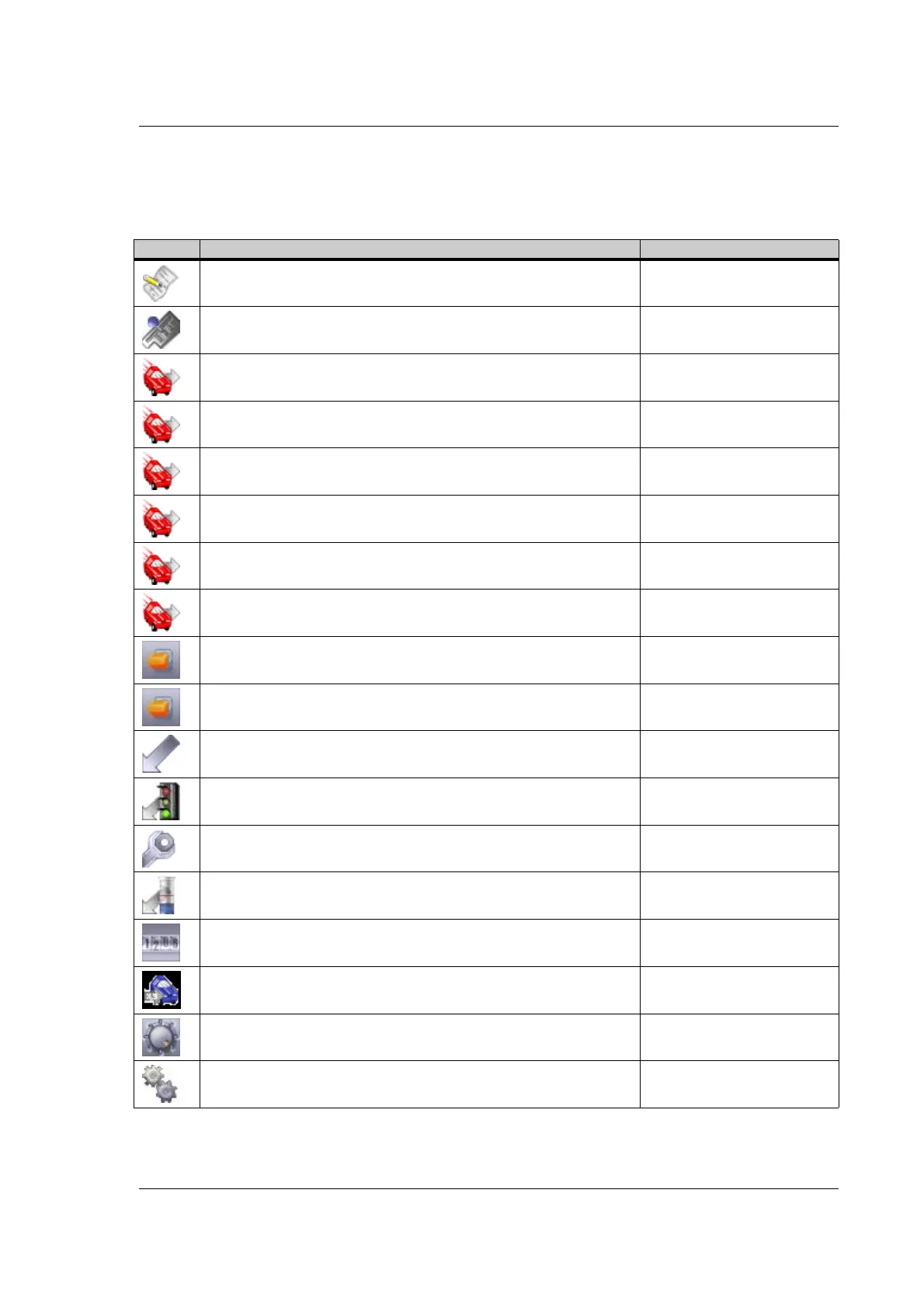
Icon Name Execution time [µs]
Remarks 0
Set operation mode 60
Move relative (no velocity, no acceleration)
1
90
Move relative + set velocity (no acceleration)
1
150
Move relative + set velocity + set acceleration
1
210
Move absolute (no velocity, no acceleration)
1
60
Move absolute + set velocity (no acceleration)
1
120
Move absolute + set velocity + set acceleration
1
180
Set single output (high/low) 30
Set multiple outputs 30*number of outputs
Unconditional jump 30
Conditional jump (inputs) 60
Set a register 60
Conditional jump (register) 120
Save position 60
Set position 90
Send fastMAC command 30
Binary command 30

 Loading...
Loading...