214 JVL Industri Elektronik A/S - User Manual - Integrated Stepper Motors MIS23x, 34x, 43x
9.7 Graphic programming command reference
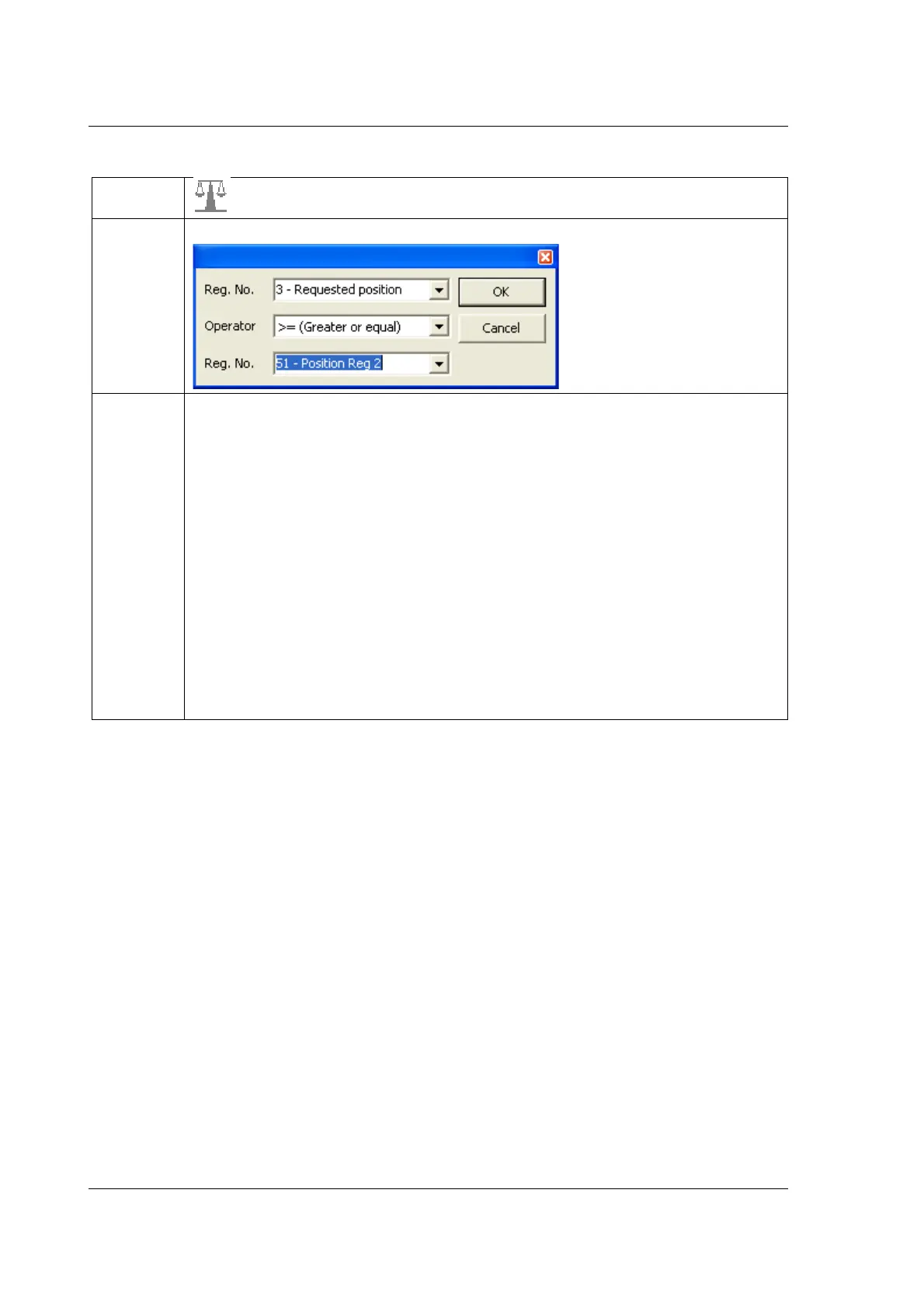
9.7.27 Jump according to a comparison
Icon:
Dialogue:
Function: Compares two registers with each other before either jumping to another line
in the program or moving on to the next line in the program. If the condition is
met, the command jumps to the specified program line. If the condition is not
met, the program proceeds to execute the next line in the program.
Any two registers can be compared with each other but the command does
not do anything beyond comparing the registers numerical values measured in
native motor units. To ensure that comparisons are meaningful, it is preferable
to compare registers that hold the same type of information in the same binary
format.
In the example above, two position registers are compared. Both hold position
information, both are 32-bit wide, and both measure position in encoder
counts. Such a comparison will always yield meaningful, predictable results.
For other types of registers, see the relevant register sections.

 Loading...
Loading...