92 JVL Industri Elektronik A/S - User Manual - Integrated Stepper Motors MIS23x, 34x, 43x
5.6 Position Limits
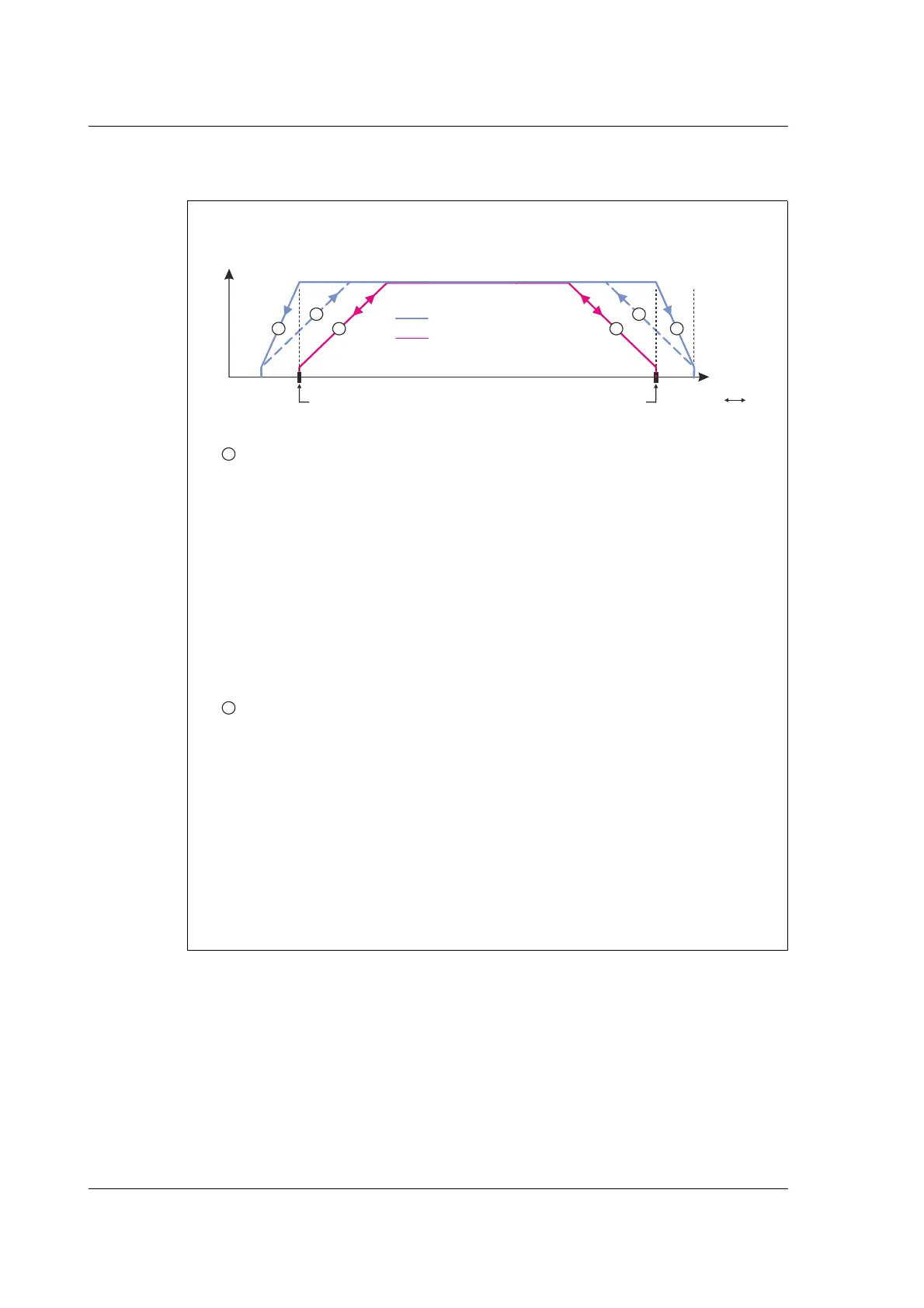
The illustration below shows how the software limits take effect at the motor move-
ment.
For further information about the internal registers that are behind the fields in MacTalk
see also
MIS23x: Min_P_IST, page 128 and Max_P_IST, page 129.
MIS34x/43x: Min_P_IST, page 163 and Max_P_IST, page 164.
TT2475-01GB
Function when motor is in or
The motor will decelerate according to the general acceleration/deceleration setting and stop at
the limit point.
Moving backwards from the stop point is done similarily.
The stop may cause an error which is determined by the setting
(Placed at the main tab in MacTalk), which may require an extra procedure before motion of
the motor is possible again.
Position mode Gear mode .
Disable Error on travel limit
When not disabled :
(default)
When disabled:
The motor will stop and an error is reported. The motor will go
to passive mode and stay in passive mode.
The error need to be cleared and a mode have to be re-entere
in order to move the motor in the opposite direction away from
the limit point.
The motor will stop. No error is reported and the motor can
immidately be moved in the opposite direction without further
action.
Position Limit minimum
= Velocity Mode
= Position and Gear mode
elocity
(unsigned)
Position
+
-
Relation between software limits and the motor behaviour
1
1
2
2
2
Function when the motor is in .
The motor will move until it reaches the limit point whereafter it will decelerate with the
Emergency deceleration and stop behind the limit point.
Velocity mode
Moving backwards from the stop point is done similarily.
The stop may cause an error which is determined by the setting
(Placed at the main tab in MacTalk), which may require an extra procedure before motion of
the motor is possible again.
Disable Error on travel limit
Position Limit Maxium
1
2
2
When not disabled :
(default)
When disabled:
The motor will stop and an error is reported. The motor will go
to passive mode and stay in passive mode.
The error need to be cleared and a mode have to be re-entered
in order to move the motor in the opposite direction away from
the limit point.
The motor will stop. No error is reported and the motor can
immidately be moved in the opposite direction without further
action.

 Loading...
Loading...