JVL Industri Elektronik A/S - User Manual - Integrated Stepper Motors MIS23x, 34x, 43x 85
5.5 Absolute Multi-turn Encoder
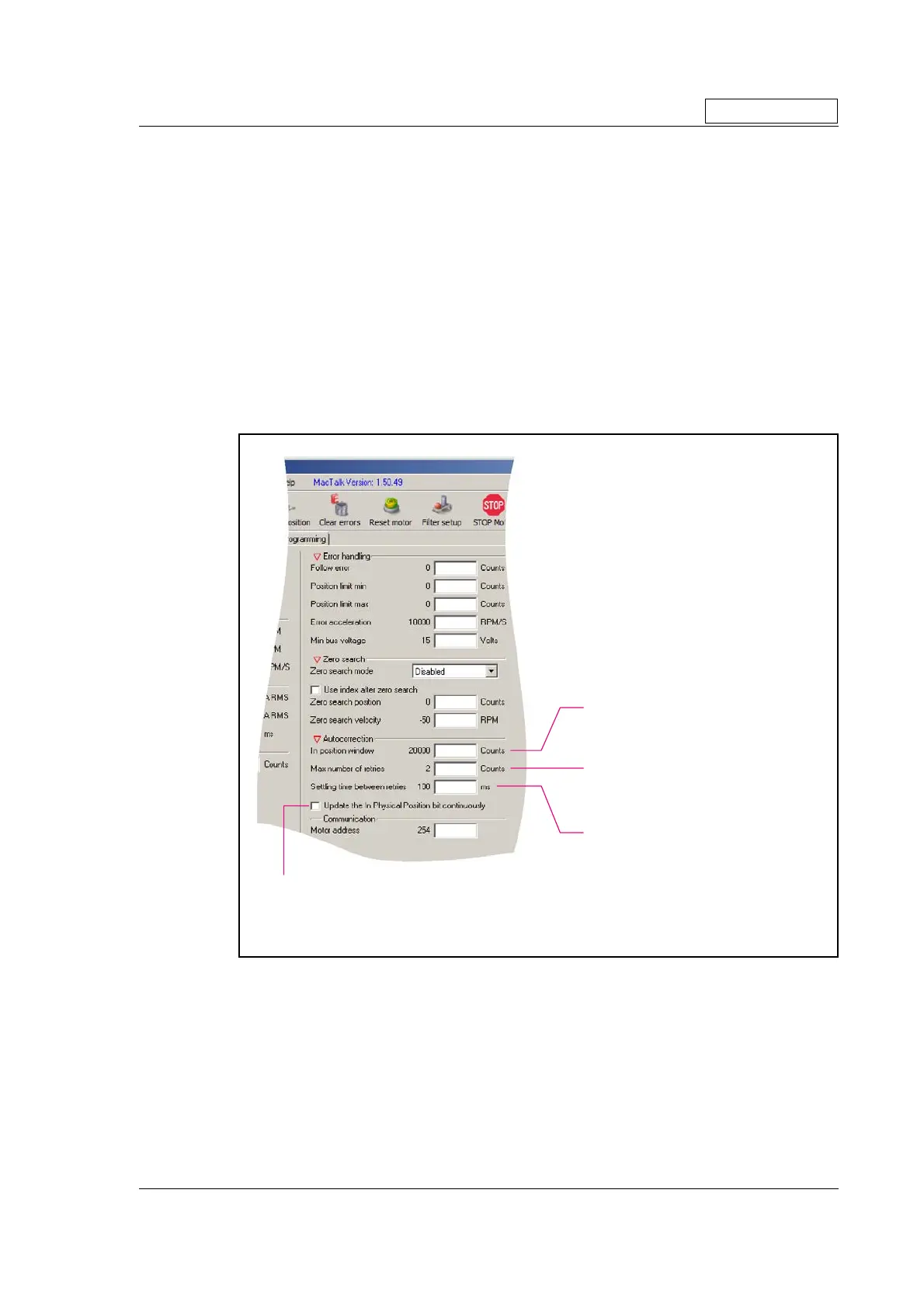
5.5.3 Position "Auto-correction"
This feature is only active when the motor is in position mode.
The auto-correction feature is only used when the motor has stalled and not reached its
final target position within the given position window.
Each time the motor has done a movement the "Actual position" counter and the "En-
coder position" counter is compared.
If the difference without sign is within the value specified in the "In position window" as
shown below no further action is taken.
If the difference is larger than the value in the "In position window" the motor will try to
correct the position by doing a new motor movement. The "Max number of retries" is
the number of times the motor will try to correct the position, and the "Settling time be
-
tween retries" is the time the motor will wait between each retry.
Only MISxxx---H3--
TT2338-01GB
When selected the in position flag will
realtime indicate if the motor is within the
osition window com
ared to a
erfect move.
An autocorrection after end movement is
performed if the difference between the
actual position and the encoder position
is more than the value specified in this field
The settling (delay) time between the retries
when doing autocorrection.
The max number of autocorrection retries
per movement is specified here.

 Loading...
Loading...