300 JVL Industri Elektronik A/S - User Manual - Integrated Stepper Motors MIS23x, 34x, 43x
16.1 MIS23x & SMC75 Registers detailed
TT2440-01GB
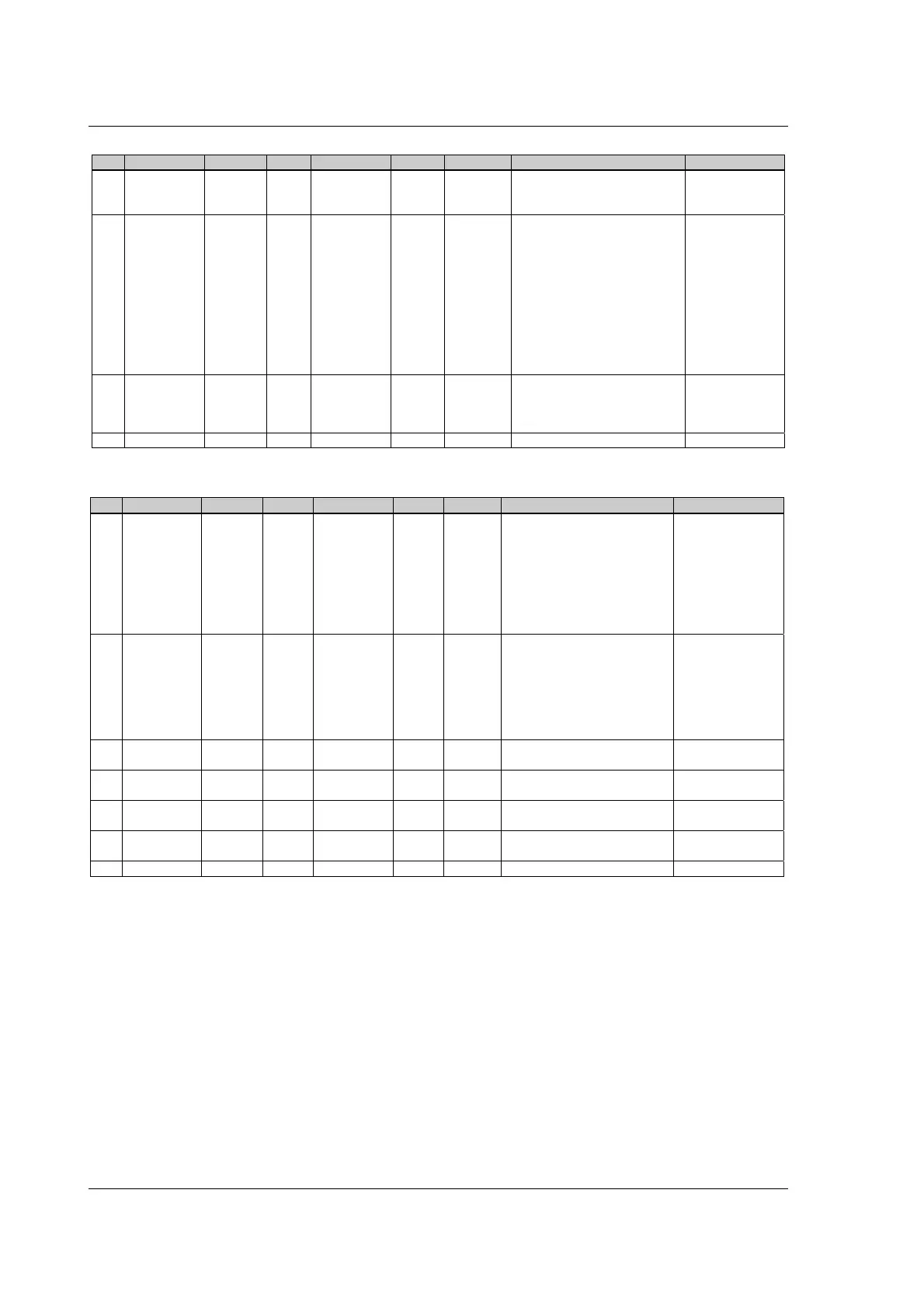
Reg Name Size Access Range Default Unit Description MacTalk name
1PROG_
VERSION
16bit R - * Major*16 +
Minor+
16384
The firmware version. The Bit 14
is set to indicate that the type is
SMC75.
“Statusbar”
2 MODE_REG 16bit R/W 0,1,2,3,11,
13, 14, 15
0 - Controls the operating mode of
the motor.
0: Passive
1: Velocity mode
2: Position mode
3: Gear mode
11: Stop (used internally)
13: Zero searchtype1
14: Zero searchtype2
15: Safe mode (don’t set
directly)
Current Mode
3 P_SOLL 32bit R/W (-2
31
)-(2
31
-1) 0 Steps The desired position. When in
position mode, themotorwill
move to this position. This value
can be changedat any time.
Position
TT2441-01GB
Reg Name Size Access Range Default Unit Description MacTalk name
5 V_SOLL 16bit R/W -1023-1023 250 RPM The maxium allowed velocity.
When in velocity mode the
motor will run constantly at this
velocity.
Specify a negativ velocity to
invert the direction.
This value can be changed at
any time.
Maxvelocity
6 A_SOLL 16bit R/W 1-65535 131 9.54
RPM/s
2
The acceleration/decelleraion
ramp to use. If this value is
changedduringatmovementit
will first be active when the
motor stops or changes
direction.
A value of 105 = 1000 RPM/s
2
Acceleration
7RUN_
CURRENT
16bit R/W 0-511 511 5.87 mA Current touse when themotor
is running.
Running Current
8STANDBY_
TIME
16bit R/W 1-65535 500 ms Number of milliseconds before
changing to standby current.
Standby Time
9STANDBY_
CURRENT
16bit R/W 0-511 128 5.87 mA The standby current. Standby Current
10 P_IST 32bit R/W (-2
31
)-(2
31
-1) - Steps The actual position. This value
can be changed at any time.
Actualposition
12 V_IST 16bit R 0-1023 - RPM The current velocity. Actual velocity

 Loading...
Loading...