JVL Industri Elektronik A/S - User Manual - Integrated Stepper Motors MIS23x, 34x, 43x 301
16.1 MIS23x & SMC75 Registers detailed
TT2442-01GB
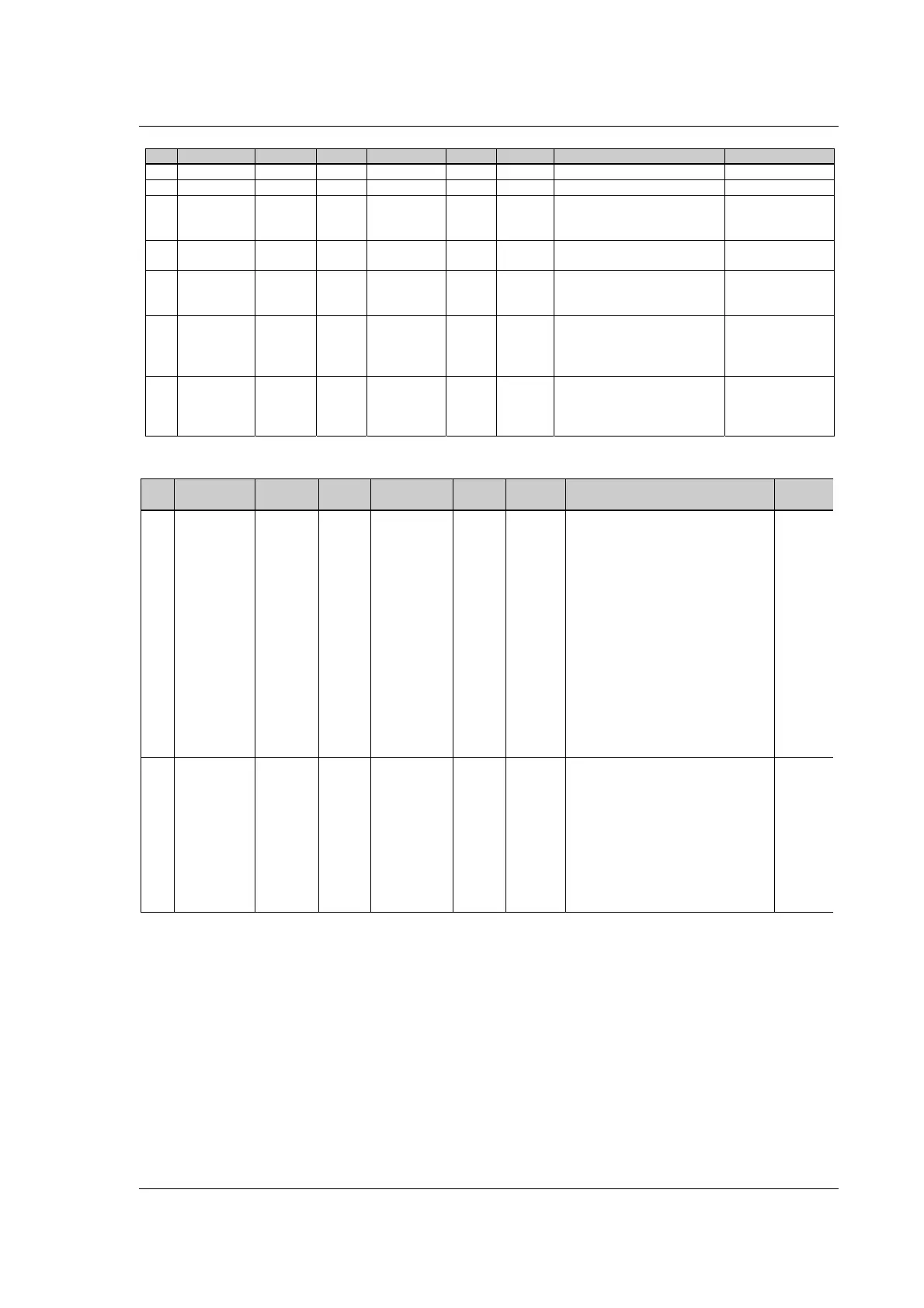
Reg Name Size Access Range Default Unit Description MacTalk name
14 GEAR1 16bit R/W (-2
15
)–(2
15
-1) 1600 Steps The multiplier of the gear factor Output
15 GEAR2 16bit R/W (-2
15
)-(2
15
-1) 2000 Counts The divider of the gear factor Input
16 ENCODER_
POS
32bit R/W (-2
31
)-(2
31
-1) - Steps If the encoder option is
installed, this show the position
feedback from the encoder.
Encoder position
18 INPUTS 16bit R - - Special The current status of the digital
inputs.
Inputs
19 OUTPUTS 16bit R/W - 0 Special The current status ofthe digital
outputs, can be written to
change the outputs.
Outputs
20 FLWERR 32bit R (-2
31
)-(2
31
-1) - Steps When the encoder option is
installed this show encoder
deviation fromthe calculated
position (P
IST).
Follow error
22 FLWERRMAX 32bit R/W (-2
31
)-(2
31
-1) 0 Steps The maximun allowed value in
FLWERR before an error is
triggered. If FLWERRMAX = 0,
the error is disabled.
Follow error max
TT2443-01GB
Reg Name Size Access Range Default Unit Description MacTalk
name
24 COMMAND 16bit R/W FastMac
commands:
0-127
Other:
256-
0 - Used to issue commands to the
motor. 0-128 is the normal FastMac
commands,where onlya subset is
implementedinSMC75.
Commands:
256: Activates new Baudrate
257: Synkronize position with
encoder
258: Calibrate internal encoder
259-266: Reserved, do not use
267: Reset
268: Save in flash and reset
270-300: Production test, donot use
320: Init SSI encoder feature
321: Read SSI encoder
N/A
25 STATUSBITS 16bit R - - Special Status bits:
Bit 0: Reserved
Bit 1: AutoCorrection active
Bit 2: In Physical Position
Bit3: Atveloctiy
Bit 4: In position
Bit 5: Accelerating
Bit 6: Decelerating
Bit 7: Zero search done
Bit 8-15: Reserved
Run
Status

 Loading...
Loading...