JVL Industri Elektronik A/S - User Manual - Integrated Stepper Motors MIS23x, 34x, 43x 105
6.4 Gear Mode
6.4.8 Principle of gear mode.
As mentioned on the previous pages the motor will follow the input signal synchronously
to a certain extend according to the gear ratio setup. There are, however, a few other
parameters which are vital for success in the actual application.
These parameters are:
Velocity The value of the velocity register will be respected at any time when the
motor is in gear mode. Therefore, care must be taken if this is set lower
than the equivalent speed of the external source producing clocks to the
gear input since it will be a limiting factor.
Acceleration Similar to the velocity register the acceleration setting will be respected
at any time and if set lower (slower speed rise time) than the external
source producing the clocks it will start to be a limiting factor.
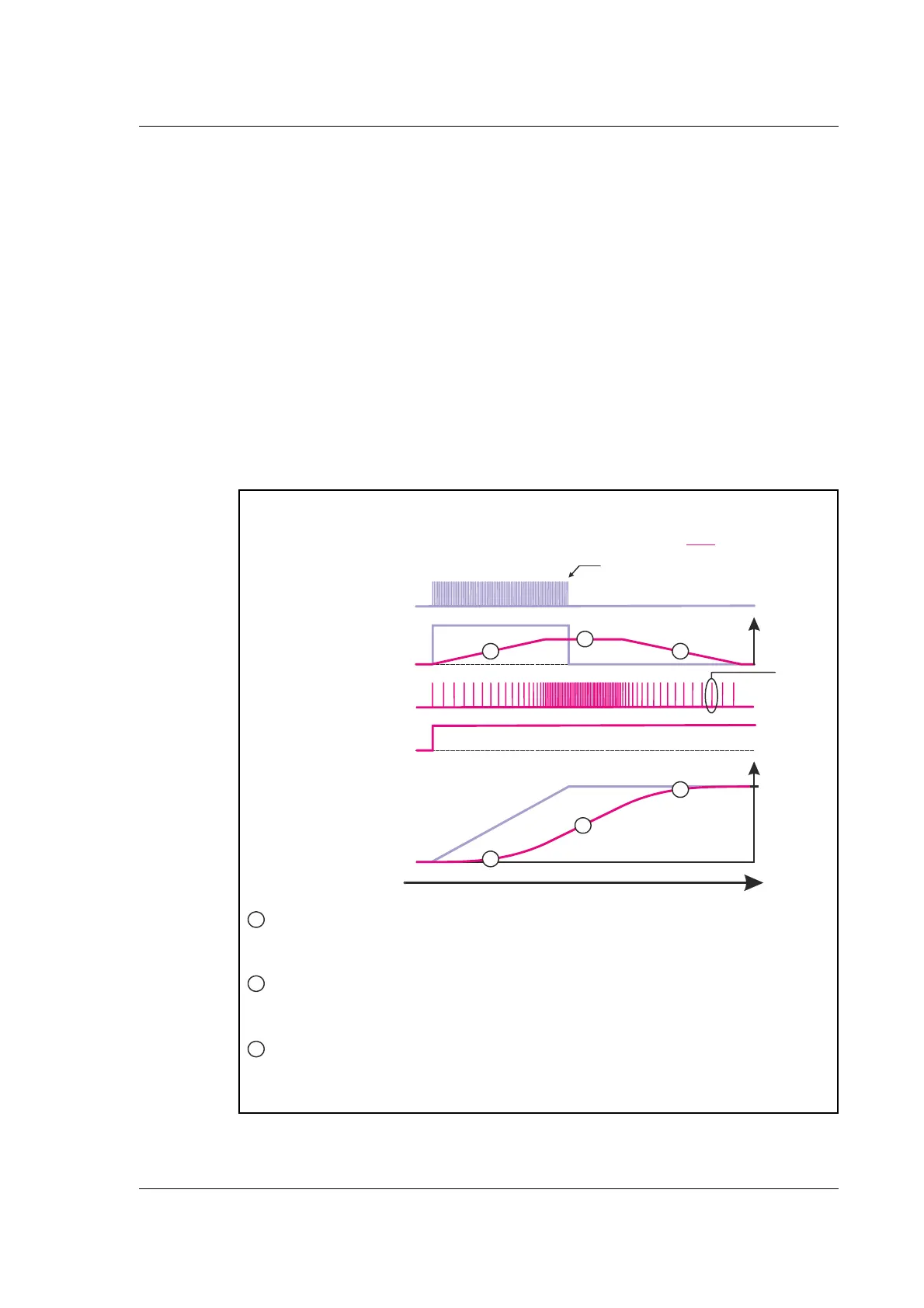
Below can be seen an example of the relation between applied clocks and the actual mo-
tor movement when having velocity and acceleration set to low values.
TT24
-
1
B
Motor steps(counts)
In total 80 steps moved
Motor Direction
Motor Velocity
(Slave)
Input position
(Master)
Motor position
(Slave)
Input clock
In total 80 steps received
Time
Position
Target
1 step
All clocks received at a fixed rate.
No acc.,speed or decel. control is included
The input clock demand a prompt high speed but the motor has to respect
the setting in the acceleration register and limit the speed increase vs time.
As result the motor will slip behind were it is supposed to be.
0
0
CW
CCW
elocity
e
at
on
etween
nput an
t
e motor
e
av
our w
en sett
ng t
e
velocity and acceleration registers to values.
Motion speed and acceleration/deceleration and .
low
controlled by the motor the masterNOT
1
1
1
2
2
2
3
3
Even the fact that the motor has slipped behind during acceleation it still has
to respect the setting in the velocity register (V_SOLL) register and limit the
speed accordingly.
The motor calculate continuously «on the fly» the necessary deceleration length
and starts decelerating according to the the setting in the acceleration register.
The motor will reach target (80 counts) exactly without any overshoot.
3
Input Velocity
(Master)

 Loading...
Loading...