JVL Industri Elektronik A/S - User Manual - Integrated Stepper Motors MIS23x, 34x, 43x 159
8.3 MIS34x & MIS43x Registers
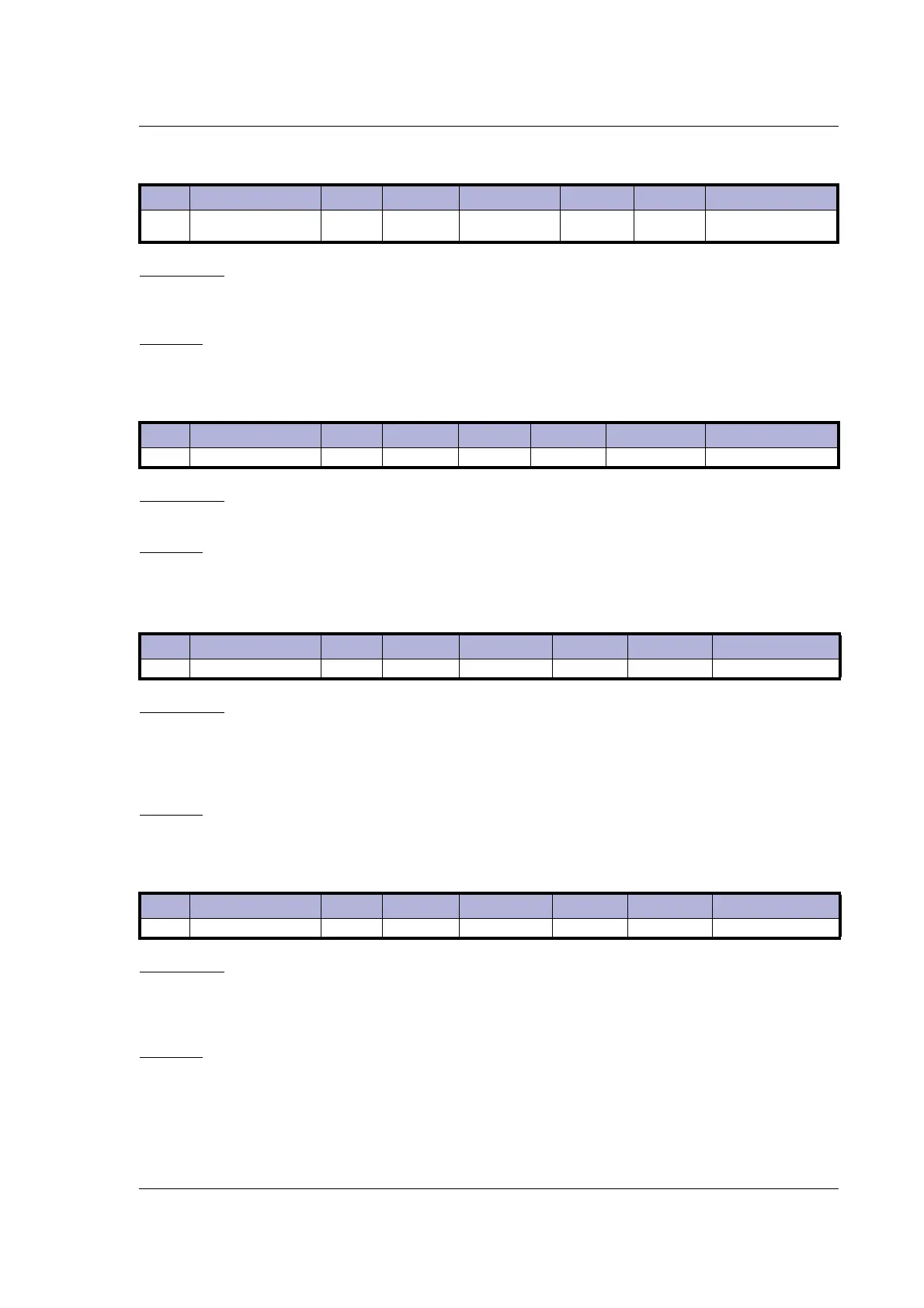
8.3.5 V_SOLL
Description: The maximum velocity allowed. When in velocity mode, the motor will run constantly at
this velocity. Specify a negative velocity to invert the direction. This value can be changed
at any time.
Example: V_SOLL = 25000, will limit the velocity to 250 RPM.
8.3.6 A_SOLL
Description: The acceleration/deceleration ramp to use. If this value is changed during at movement,
it will first be active when the motor stops or changes direction.
Example: A_SOLL = 100, will set the acceleration to 100 RPM/s.
8.3.7 Run_Current
Description: This register sets the running current for the motor. 511 is the maximum possible cur-
rent, corresponding to 3A RMS. The running current is active when the motor is running
and after it stops until the specified standby time has elapsed.
See Standby_Time, page 124.
When the RUN_CURRENT is changed, the new motor current will be set instantly.
Example: RUN_CURRENT = 100, will set the running current to 0.59A RMS.
8.3.8 Standby_Time
Description: This register sets the standby time. This time is the time from the last step has been
performed until the current changes from running to standby. When a new request for
a move is received the current changes from standby to running with no delay.
Example: STANDBY_TIME = 200, will result in the controller switching to the standby current
after 200ms.
Reg Name Size Access Range Default Unit MacTalk name
5 V_SOLL 32bit R/W
±1-30000
(0.01-3000RPM)
25000
(250 RPM)
RPM/100 Max velocity
Reg Name Size Access Range Default Unit MacTalk name
6 A_SOLL 32bit R/W 1-500000 1000 RPM/s Acceleration
Reg Name Size Access Range Default Unit MacTalk name
7 RUN_CURRENT 32bit R/W 0-511 511 5.87mA Running Current
Reg Name Size Access Range Default Unit MacTalk name
8 STANDBY_TIME 32bit R/W 1-65535 500 ms Standby Time

 Loading...
Loading...