Set Up for Construction Operation
2-33
2
Motion 4000
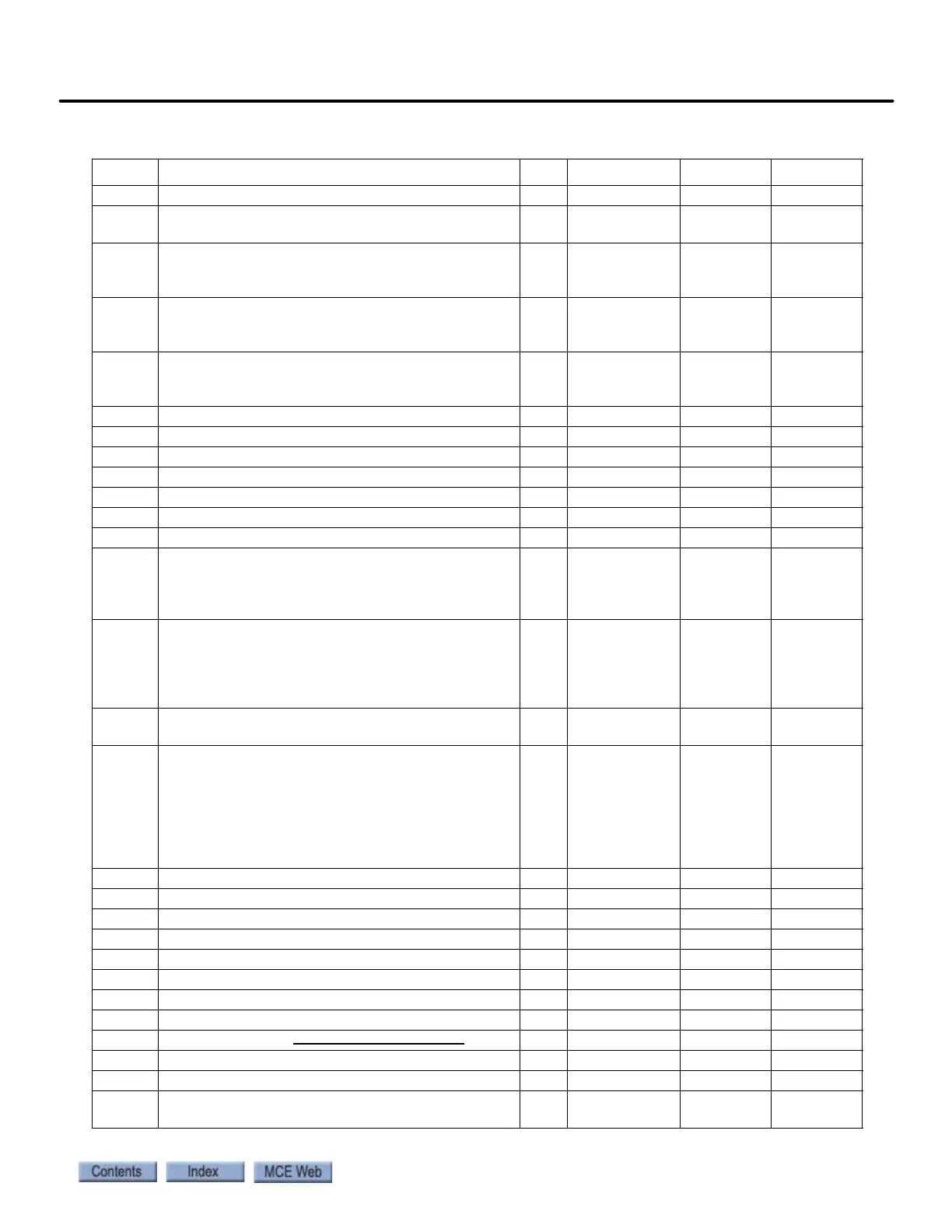
LF.15 IM: Power factor, PM: not visible 1 0.50 - 1.00 0.90 0.90
LF.16 IM: Field weakening speed, PM: not visible rpm 0.0 - 6000.0 set @ 80%
of LF.11
*
LF.17 Rated motor torque, IM - read only, auto calc.
PM - enter motor name plate torque
lb ft 1 - 10000 IM - calc.
PM - 18
IM - ***
PM
*
LF.18 PM: Motor stator resistance - from data sheet or
learn procedure (see F5 Drive manual) IM: not
visible
ohm 0.0 - 49.999 49.999 PM
*
LF.19 PM: Motor leakage inductance - from data sheet
or learn procedure (see F5 Drive manual)
IM: not visible
mH 0.01 - 500.00 1.00 PM
*
LF.20 Contract speed fpm 0 - 1600 0*
LF.21 Traction sheave diameter (measured value) inch 7.00 - 80.00 24.00 *
LF.22 Gear reduction ratio 1 1.00 - 99.99 30.00 *
LF.23 Roping ratio 1 1 - 8 1*
LF.24 Load weight lbs 0 - 30000 0*
LF.25 Estimated gear ratio: Read only, auto calc. 0.01 1.00 - 99.99 - ***
0.LF.26 Encoder Interface: displays feedback type - - - ***
LF.27 Encoder pulse number
For InclE and SinCo reference to customer data
For HIPEr set to 1024
For EndAt set to 2048
ppr 256 - 16384 1024
LF.28 Encoder channel swap / direction
0 nothing reversed
1 encoder A<B>B swapped
2 motor rotation reversed
3 motor rotation reversed, A<B>B swapped
1 0 - 3 0*
0
LF.29 Encoder sample time
(recommend gearless = 4, geared = 8)
mSec 0.5 - 32 4 *
LF.30 Control mode
0, 1Open loop induction motor operation
2 -Closed loop speed control (LF. 2 = A Spd)
3 -Closed loop speed control with pre-torque
4 -Closed loop torque control (LF. 2 = A tor)
5 - Close loop speed control with synthesized pre-
torque
10 - 5 0 *
A.LF.31 Kp speed accel: Proportional gain, accel & run 1 1 - 50396 3000 ** 3000
d.LF.31 Kp speed decel: Proportional gain, decel 1 1 - 50396 3000 ** 3000
P. L F. 3 1 Kp speed torque (Synth. Pre-torque) 1 1 - 50396 2000 2000
A.LF.32 Ki speed accel: Integral gain, accel & run 1 1 - 26214 350 ** 350
d.LF.32 Ki speed decel: Integral gain, decel 1 1 - 26214 250 ** 250
P. L F. 3 2 KI speed torque (Synth. Pre-torque) 1 1 - 26214 10000 10000
A.LF.33 Ki speed offset accel: Gain at low speed, accel 1 0 - 8000 3000 ** 3000
d.LF.33 Ki speed offset decel: Gain at low speed, decel 1 0 - 8000 1000 ** 1000
0.LF.36 Maximum torque (Auto calc by the drive
). lb ft 0 - 500%Trtd Calculated ***
1.LF.36 Maximum torque emergency operation (=LF.17) lb ft 0 - 500%Trtd Calculated ***
LF.37 Open loop torque boost: Open loop op. only % 0 - 25.5 5.0 5.0
LF.38 Carrier frequency; 0 = 8 KHz, 1 = 16KHz
(Note: set LF.38 = 0 if E.OL2 error on drive)
10, 1 0 *
Table 2.4 TorqMax F5 Parameters
Display Parameter Description Unit Range Default Factory