Installation
2-34 Manual # 42-02-2P24
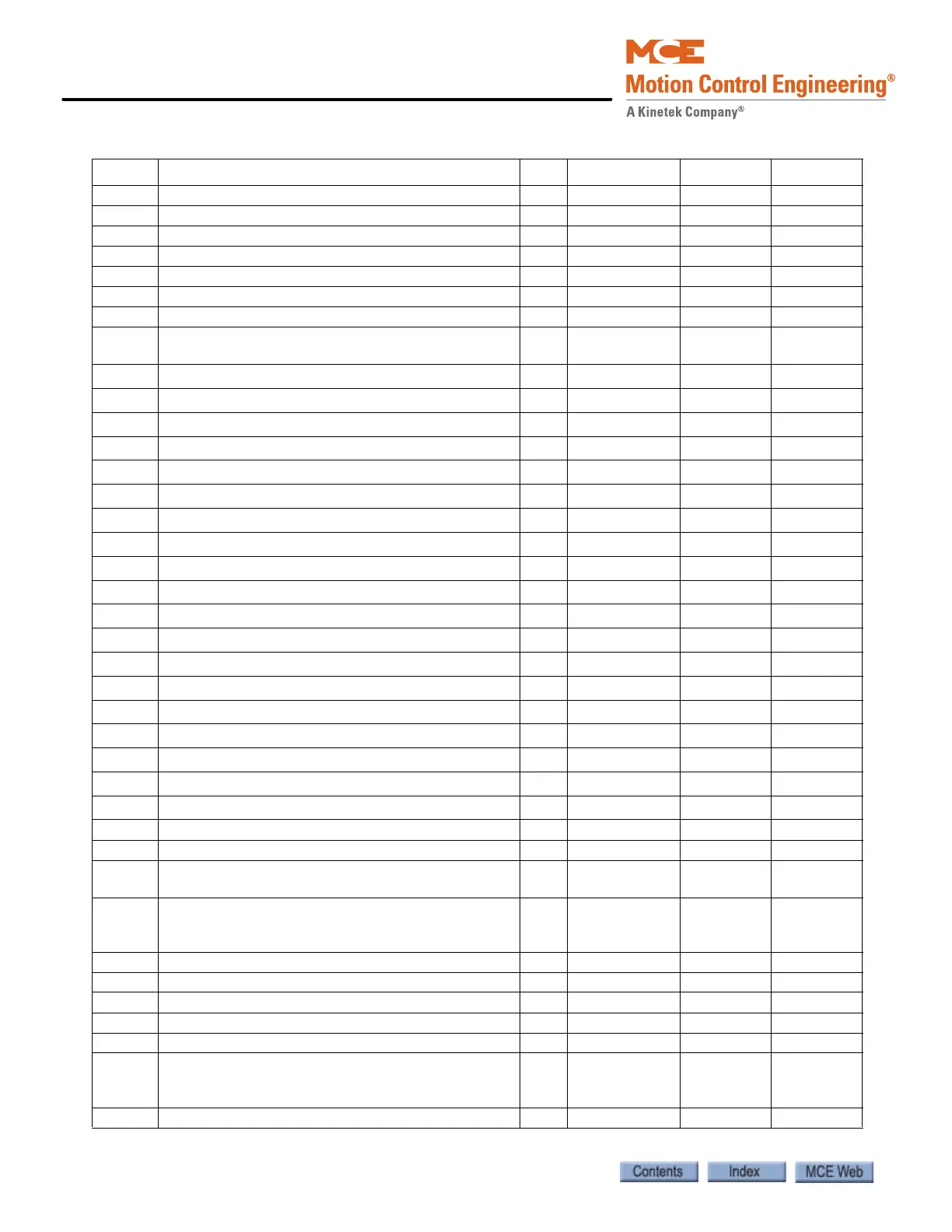
LF.41 Leveling speed (Not used, must set to 0) fpm 0 - 25 0.0 0.0
LF.42 High speed (Not used, set from 0 to LF.20) fpm 0.0 - LF.20 0.0 0.0
LF.43 Inspection speed (Not used, must set to 0) fpm 0.0 - 150.00 0.0 0.0
LF.44 High leveling speed (Not used, must set to 0) fpm 0.0 - LF.20 0.0 0.0
LF.45 Earthquake Speed (Not used, must set to 0) fpm 0.0 – 150.0 0.0 0.0
LF.46 Emergency Pwr Speed (Not used, must set to 0) fpm 0.0 - LF.20 0.0 0.0
LF.47 Intermediate speed (Not used, must set to 0) fpm 0.0 - LF.20 0.0 0.0
LF.49 Overspeed function Test (N/A for drive SW Version
1.61)
fpm 1- 2400 100 100
0.LF.50 Profile 0 - Starting jerk (not used)
ft/s
3
OFF
0.LF.51 Profile 0 - Acceleration (not used)
ft/s
2
OFF
0.LF.52 Profile 0 - Acceleration jerk (not used)
ft/s
3
OFF
0.LF.53 Profile 0 - Deceleration jerk (not used)
ft/s
3
OFF
0.LF.54 Profile 0 - Deceleration (not used)
ft/s
2
OFF
0.LF.55 Profile 0 - Approach jerk (not used)
ft/s
3
OFF
1.LF.50 Profile 1 - Starting Jerk (not used)
ft/s
3
OFF
1.LF.51 Profile 1 - Acceleration (not used)
ft/s
2
OFF
1.LF.52 Profile 1 - Acceleration jerk (not used)
ft/s
3
OFF
1.LF.53 Profile 1 - Deceleration jerk (not used)
ft/s
3
OFF
1.LF.54 Profile 1 - Deceleration (not used)
ft/s
2
OFF
1.LF.55 Profile 1 - Approach jerk (not used)
ft/s
3
OFF
2.LF.50 Profile 2 - Starting jerk (not used)
ft/s
3
OFF
2.LF.51 Profile 2 - Acceleration (not used)
ft/s
2
OFF
2.LF.52 Profile 2 - Acceleration jerk (not used)
ft/s
3
OFF
2.LF.53 Profile 2 - Deceleration jerk (not used)
ft/s
3
OFF
2.LF.54 Profile 2 - Deceleration (not used)
ft/s
2
OFF
2.LF.55 Profile 2 - Approach jerk (not used)
ft/s
3
OFF
LF.56 Stop jerk (not used)
ft/s
3
OFF
LF.57 Speed following error (0 = off, 1 = on,) 1 off, on 1 1
LF.58 Speed difference % 0 - 30 10 10
LF.59 Trigger time speed difference: Following error
timer
sec 0.0 -1.0 1.0 1.0
LF.61 Emergency operation mode. If using an MCE
TAPS, (Traction Auxiliary Power Supply) this must
be set to di1.
Off, SPd1,
SPd2, SPd3,
di1
off off
(di1 if TAPS
used)
LF.67 Pre-torque gain - 0.25 - 2.00 1.00 1.00
LF.68 Pre-torque offset % -100.0 - 100.0 0.00 0.00
LF.69 Pre-torque direction (0, 1 = +V, -1 = -V) 1 0, 1, -1 1 1
LF.70 Speed pick delay (Delay to turn on DRO) sec 0.0 - 3.0 0.30 0.30
LF.71 Brake pick delay sec 0.0 - 3.0 0.05 0.05
LF.76 Encoder resolution multiplier
2 for incremental encoder
8 for Sin/Cos, EnDat or Hiperface encoder
10 - 13 2
LF.77 Absolute encoder position (measured) 1 0 - 65535h 0 *0
Table 2.4 TorqMax F5 Parameters
Display Parameter Description Unit Range Default Factory