D-118 Programming
DC590+ Series DC Digital Drive
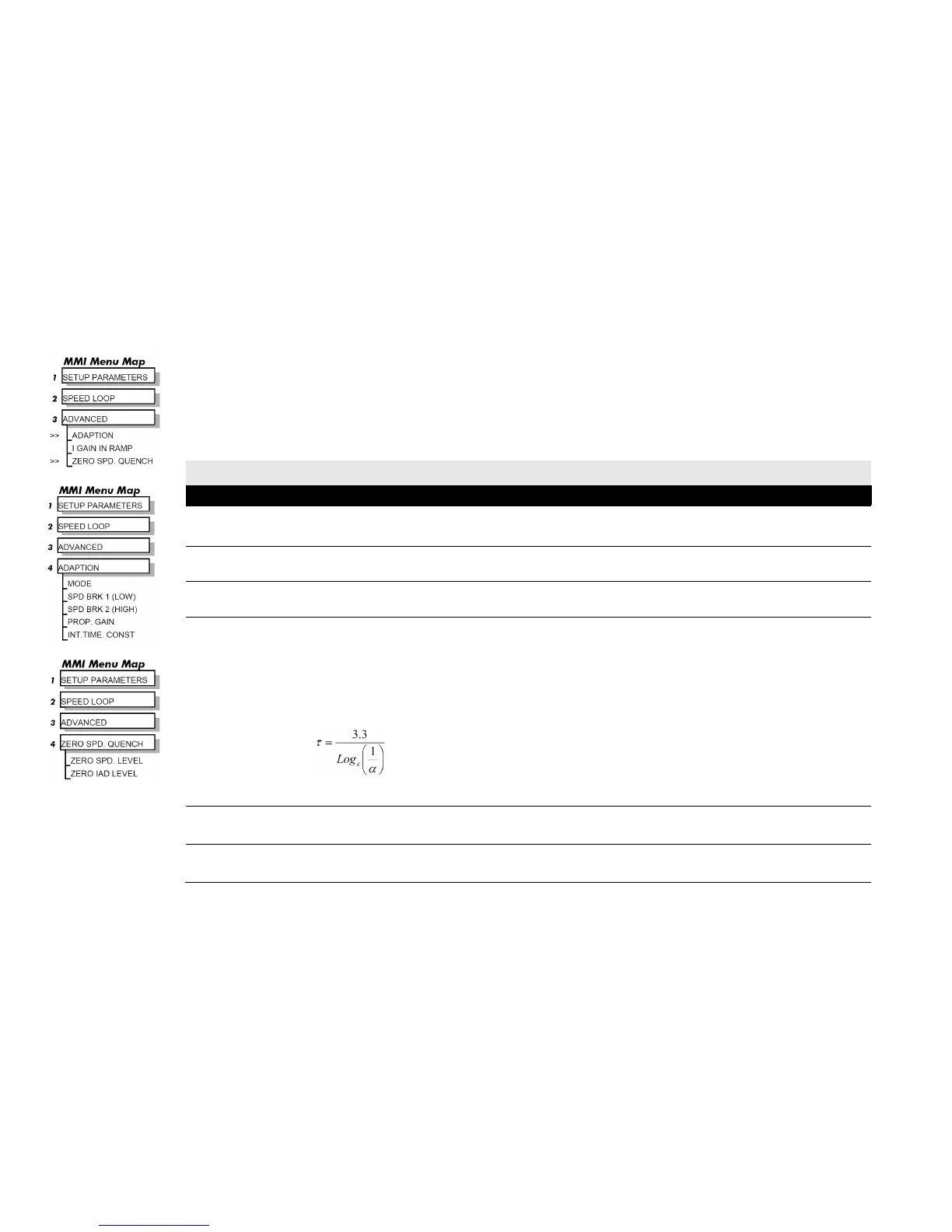
5. Zero speed/current disabling of thyristor firing
The current loop is disabled when SPEED DEMAND, SPEED FEEDBACK and CURRENT DEMAND have all dropped to the threshold
levels set by ZERO SPD. LEVEL and ZERO IAD LEVEL.
This is similar to Standstill logic (it stops making current but the contactor stays energised) except that the speed loop remains enabled and
this will cause the current loop to unquench very quickly.
SPEED LOOP
SPD PROP GAIN 14 0.00 to 200.00
Speed loop PI proportional gain adjustment.
SPD INT TIME 13 0.001 to 30.000 s
Speed loop PI integral gain adjustment.
INT. DEFEAT 202 OFF / ON
When ON it inhibits the integral part of the speed loop PI control to give proportional only control.
SPEED FBK FILTER 547 0.000 to 1.000
A simple filter function that is applied to speed feedback to reduce ripple caused by low line count encoders and noisy tachos. A value of 0 disables
the filter action ,and 1.00 is the maximum value. A typical value would be between 0.5 and 0.75.
INCREASING THE FILTER VALUE MAY MAKE THE SPEED LOOP UNSTABLE.
The filter time constant in milliseconds can be calculated from the following equation:
Where is the value of SPD FBK FILTER. A value of 0.5 equates to a filter time of 4.8ms, 0.8 to 14.7ms, and 0.9 to 31.2ms.
SETPOINT 1 289 -105.00 to 105.00 %
Speed Setpoint 1 (Default Setpoint Sum 1 O/P).
SIGN 2 (A3) 9 NEGATIVE / POSITIVE

 Loading...
Loading...









