D-40 Programming
DC590+ Series DC Digital Drive
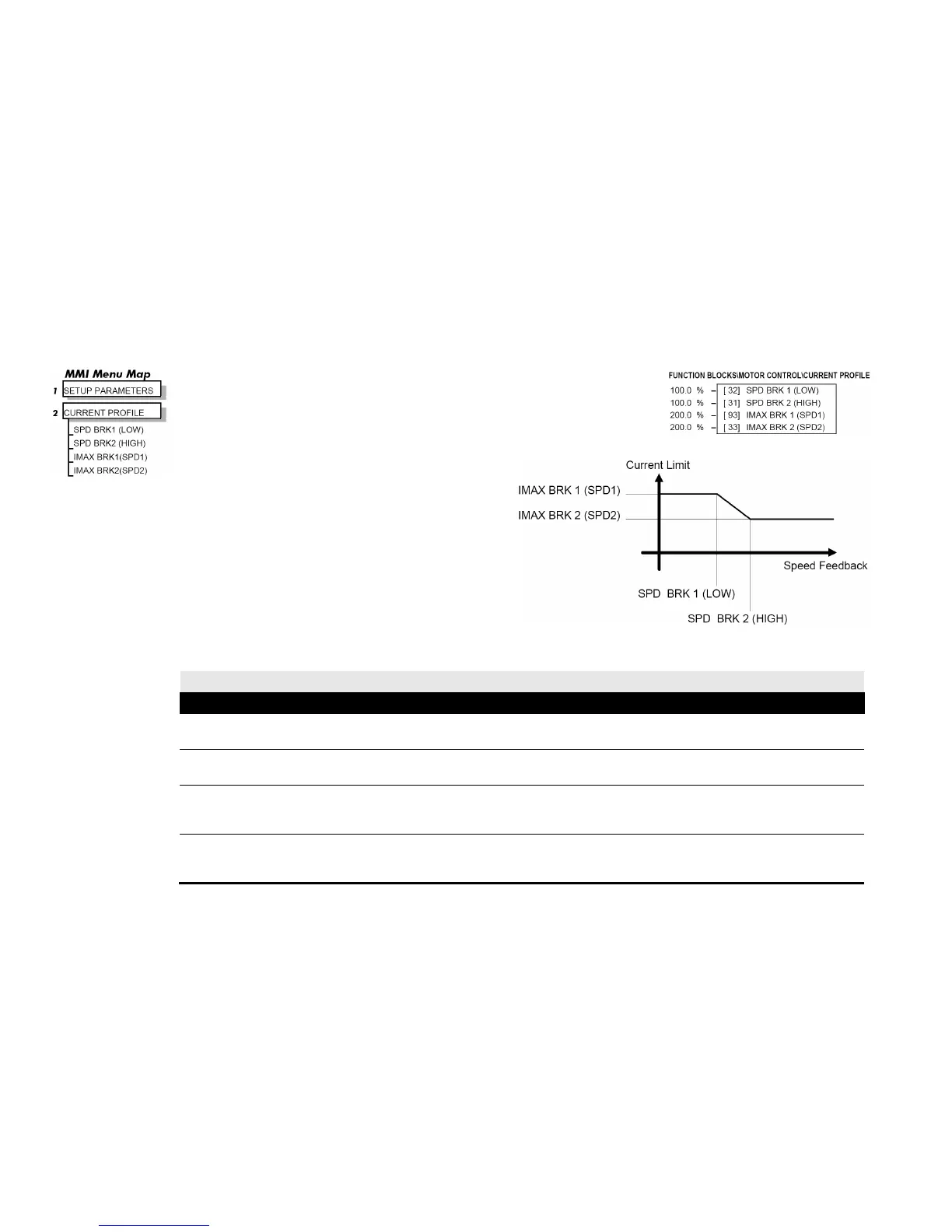
CURRENT PROFILE
Use this to clamp the current limit for applications where motors have a reduced ability to
commutate armature current at low field currents.
Normally this is required when using Field Weakening, although some motors exhibit commutation
limitations at higher speeds even with rated field current.
The input to the block is SPEED FEEDBACK from the SPEED
LOOP function block. The output of the block changes the current
limit clamp in the current loop.
• When SPEED FEEDBACK exceeds SPD BRK 1 (LOW), the
current profile begins scaling the current limit as set by IMAX
BRK 1 (SPD1).
• As the SPEED FEEDBACK increases toward SPD BRK2
(HIGH), the current limit is reduced linearly toward IMAX BRK2
(SPD2).
• When the speed exceeds SPD BRK2 (HIGH), the current limit
remains at the IMAX BRK2 (SPD2) setting.
CURRENT PROFILE
SPD BRK 1 (LOW) 32 0.0 to 100.0 % (h)
This is the motor speed at which current limit profiling begins.
SPD BRK 2 (HIGH) 31 0.0 to 100.0 % (h)
This is the upper speed limit at which current limit profiling ends.
IMAX BRK 1 (SPD1) 93 0.0 to 200.0 % (h)
This sets the current limit value at or below speed break-point 1, provided the other current limit clamps (inverse time overload, bipolar clamps and
main current clamps) are greater than this setting.
IMAX BRK 2 (SPD2) 33 0.0 to 200.0 % (h)
This sets the current limit value at or above speed break-point 2, provided the other current limit clamps setting (inverse time overload, bipolar
clamps and main current clamps) are greater than this.

 Loading...
Loading...









