Operating the Drive 4-19
DC590+ Series DC Digital Drive
Integral (INT.TIME CONST.)
The Integral term is used to reduce steady state error between the setpoint and feedback values of the controller by accumulating current demand in
proportion to the error input. If the integral is set to zero, then there will always be a steady state error.
A Method for Setting-up the PI Gains
The gains should be set-up so that a critically damped response is achieved for a step change in setpoint. An underdamped or oscillatory system can be
thought of as having too much gain, and an overdamped system has too little.
To set up the P gain, set the I gain to zero. Apply a step change in setpoint that is typical for the System, and observe the speed feedback response on
terminal A7. Increase the gain and repeat the test until the system becomes oscillatory. At this point, reduce the P gain until the oscillations disappear.
This is the maximum value of P gain achievable.
If the steady state error is significant, i.e. the feedback is not sufficiently close to the setpoint value, the I term needs to be used. As before, increase the
I gain and apply the step change. Monitor the output. If the output becomes oscillatory, reduce the P gain slightly. This should reduce the steady state
error. Increasing the I gain further may reduce the time to achieve zero steady state error.
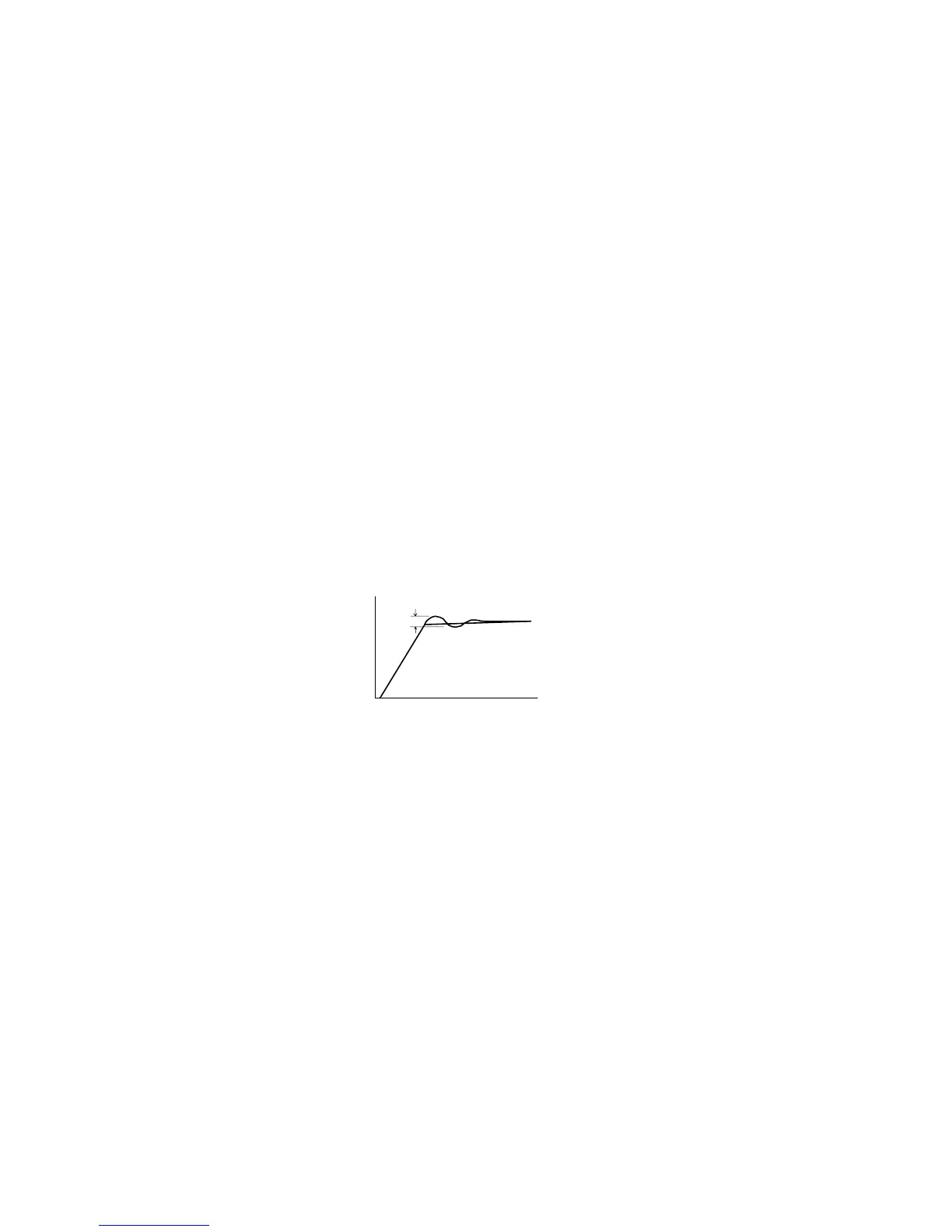
Correct Response
Critically Damped Response with no more than 4% of
maximum speed from first overshoot to first undershoot
Speed
Time
4%
9

 Loading...
Loading...









