5.7 Operator Programming Errors
238 YASKAWA TM.V1000.01 V1000 Drive Installation & Start-Up Manual (Preliminary 01-19-07)
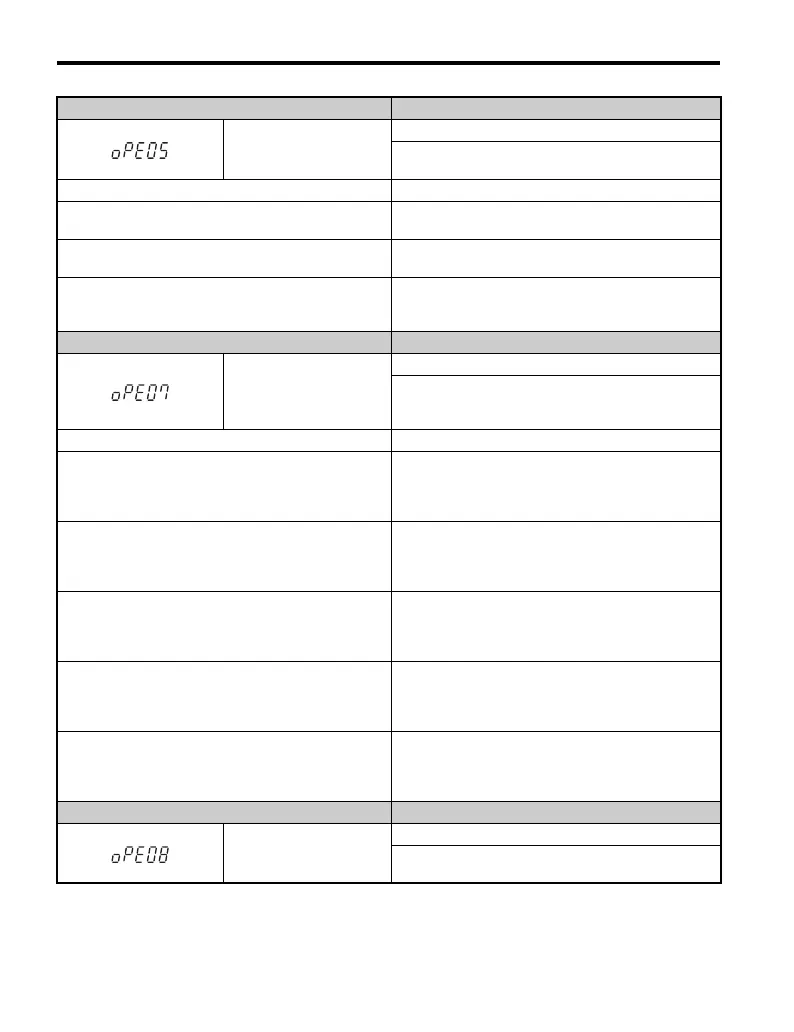
LED Operator Display Error Name
oPE05
Run Command Selection Error
The run command selection parameter b1-02 is set to 3
but no option board is installed.
Cause Possible Solutions
Frequency reference is assigned to an option card
(b1-01 = 3) that is not connected to the drive.
Reconnect the option card to the drive.
The run command is assigned to an option card
(b1-02 = 3) that is not connected to the drive.
Reconnect the option card to the drive.
Frequency reference is assigned to the pulse train input
(b1-01 = 4), but terminal RP is not set for pulse train input
(H6-01 is greater than 0).
Set H6-01 to “0”.
LED Operator Display Error Name
oPE07
Multi-Function Analog Input Selection Error
A contradictory setting is assigned to multi-function
analog inputs H3-02 through to H3-10 and PID functions
conflict.
Cause Possible Solutions
H3-02 and H3-10 are set to the same value.
Change the settings to H3-02 and H3-10 so that functions
no longer conflict. Note: Both 0 (primary analog
frequency reference) and F (Not Used) can be set to
H3-02 and H3-10 at the same time.
The following contradictory settings have been made at
the same time:
H3-02 or H3-10 = B (PID Feedback)
H6-01 (Pulse Train Input) = 1 (PID Feedback)
Disable one of the PID selections.
The following contradictory settings have been made at
the same time:
H3-02 or H3-10 = C (PID Target Value)
H6-01 = 2 (pulse train input sets the PID target value)
Disable one of the PID selections.
The following contradictory settings have been made at
the same time:
H3-02 or H3-10 = C (PID Target Value)
b5-18 = 1 (enables b5-19 as the target PID value)
Disable one of the PID selections.
The following contradictory settings have been made at
the same time:
H6-01 or H3-10 = C (PID Target Value)
b5-18 = 1 (enables b5-19 as the target PID value)
Disable one of the PID selections.
LED Operator Display Error Name
oPE08
Parameter Selection Error
A function has been set that cannot be used in the motor
control method selected.

 Loading...
Loading...










