B.2 Parameter Table
YASKAWA TM.V1000.01 V1000 Drive Installation & Start-Up Manual (Preliminary 01-19-07) 367
Parameter List
B
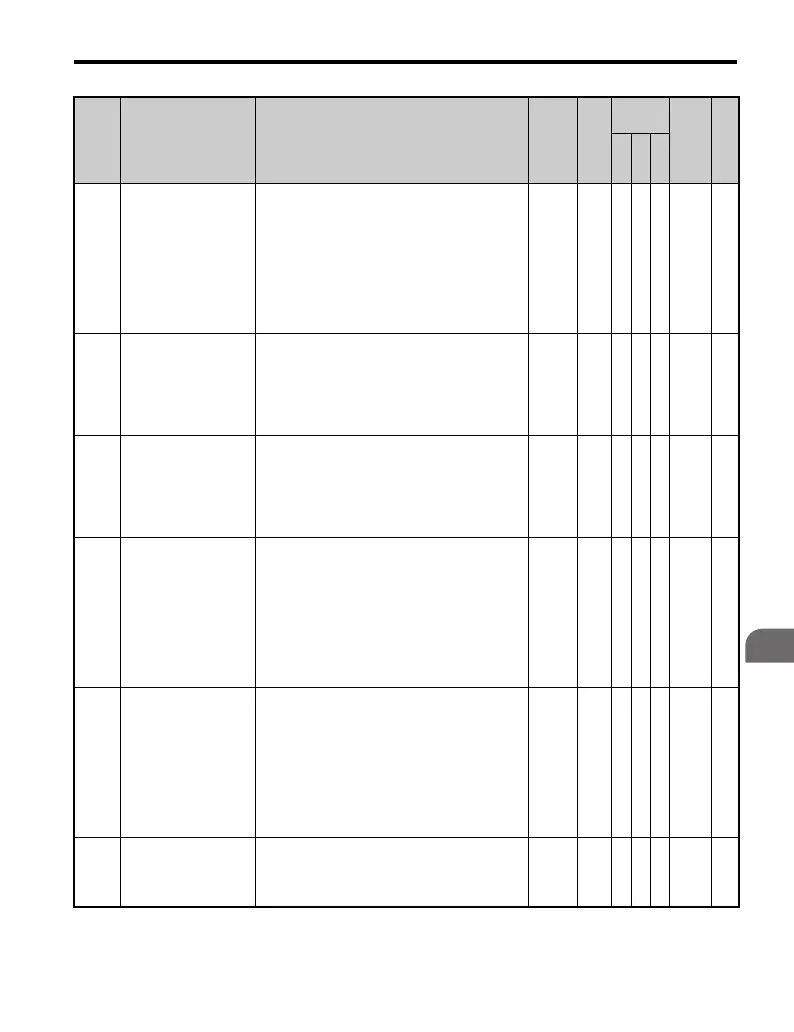
F1-04
Operation Selection at
Deviation
(for Simple PG V/f
Control)
Sets the stopping method when a speed
deviation (DEV) fault occurs. Refer to F1-10
and F1-11.
0: Ramp to stop - Decelerate to stop using the
active deceleration time.
1: Coast to stop
2: Fast-stop - Decelerate to stop using the
deceleration time in C1-09.
3: Alarm only - Drive continues operation.
0 to 3 3 A −− 383 —
F1-08
Overspeed Detection
Level
(for Simple PG V/f
Control)
Configures the overspeed fault (OS) detection.
OS fault will occur, if the motor speed
feedback is greater than the F1-08 setting for a
time longer than F1-09.
F1-08 is set as a percentage of the maximum
output frequency (E1-04). Refer to F1-03.
0 to 120
115
%
A −− 387 —
F1-09
Overspeed Detection
Delay Time
(for Simple PG V/f
Control)
Configures the overspeed fault (OS) detection.
OS fault will occur, if the motor speed
feedback is greater than the F1-08 setting for a
time longer than F1-09.
F1-08 is set as a percentage of the maximum
output frequency (E1-04). Refer to F1-03.
0.0 to
2.0
–
<1>
A −− 388 —
F1-10
Excessive Speed
Deviation Detection
Level
(for Simple PG V/f
Control)
Configures the speed deviation fault (DEV)
detection.
DEV fault will occur if the speed deviation is
greater than the F1-10 setting for a time longer
than F1-11. F1-10 is set as a percentage of the
maximum output frequency (E1-04).
Speed deviation is the difference between
actual motor speed and the frequency reference
command. Refer to F1-04.
0 to 50 10% A −− 389 —
F1-11
Excessive Speed
Deviation Detection
Delay Time
(for Simple PG V/f
Control)
Configures the speed deviation fault (DEV)
detection.
DEV fault will occur if the speed deviation is
greater than the F1-10 setting for a time longer
than F1-11. F1-10 is set as a percentage of the
maximum output frequency (E1-04).
Speed deviation is the difference between
actual motor speed and the frequency reference
command. Refer to F1-04.
0.0 to
10.0
0.5 s A −− 38A —
F1-14
PG Open-Circuit
Detection Time
(for Simple PG V/f
Control)
Configures the PG open (PGO) function. PGO
will be detected if no PG pulses are detected
for a time longer than F1-14. Refer to F1-02.
0.0 to
10.0
2.0 s A −− 38D —
No. Name Description Range Def.
Control
Mode
Addr.
Hex
Pg.
V/
f
O
L
V
P
M

 Loading...
Loading...










