AV7000 LINEAR CAMERA REFERENCE MANUAL
Trigger Source
to Position
Sensor
Enter the physical distance from the trigger to the positions sensor.
Select Active High or Active Low from the drop-down list. This depends on the
active state of the selected photoelectric sensor.
Selections:
Active High: Object is detected when current is flowing through the trigger
input pins.
Active Low: Object is detected when there is NO current is flowing through the
trigger input pins.
Enter the Trigger Debounce distance in the field provided.
This distance must be a positive value and is the minimum distance the photo
detector should be blocked for the system to consider an object to scan, reducing
false triggers. A typical value is 25mm or 1 inch. This value must be significantly
less than the distance from the trigger to read line.
Extend Leading
Edge of Photo
Sensor
Enter a distance to extend the leading edge of the photo sensor by.
Extend Trailing
Edge of Photo
Sensor
Enter a distance to extend the trailing edge of the photo sensor by.
Select Enabled or Disabled from the drop-down list if your system requires
crossbelt sorter mode.
Select No Position Sensor, RangeFinder, STI Light Curtain, DL Light Curtain,
Dimensioner (Legacy), or Dimensioner (Corner Detection) from the drop-down
list, depending on the specific position sensor used by the system.
Position Sensor
Height Offset
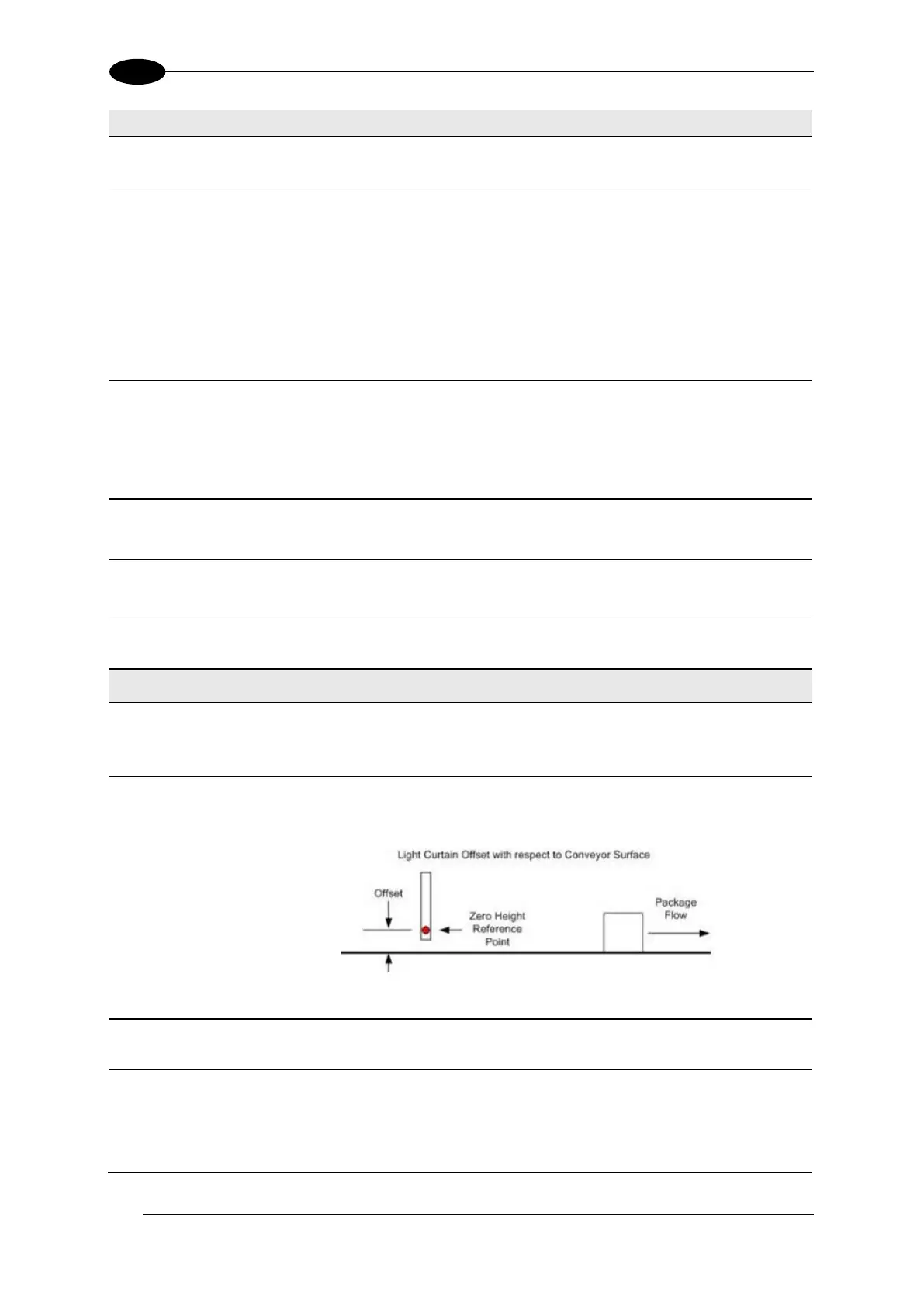
Enter the distance between the light curtain’s (light array’s) zero height reference
point and the conveyor’s surface. This should be set to zero (0) for other, non-light
curtain position sensors.
Figure 97: Position Sensor Height Offset
Position Sensor
Transmit Delay
Enter the distance from the position sensor to the transmit point in the field
provided.
Minimum Object
Height for Corner
Detection
Enter a height in the field provided. When using a dimensioner for focusing, this is
usually set to the minimum package height but can be set higher. Corner detection
will not be attempted on any package with a height less than this parameter value.
This is only visible when Dimensioner (Corner Detection) is selected for the
Position Sensor Type.

 Loading...
Loading...