Chapter 11 Motion Control Instructions
11-5
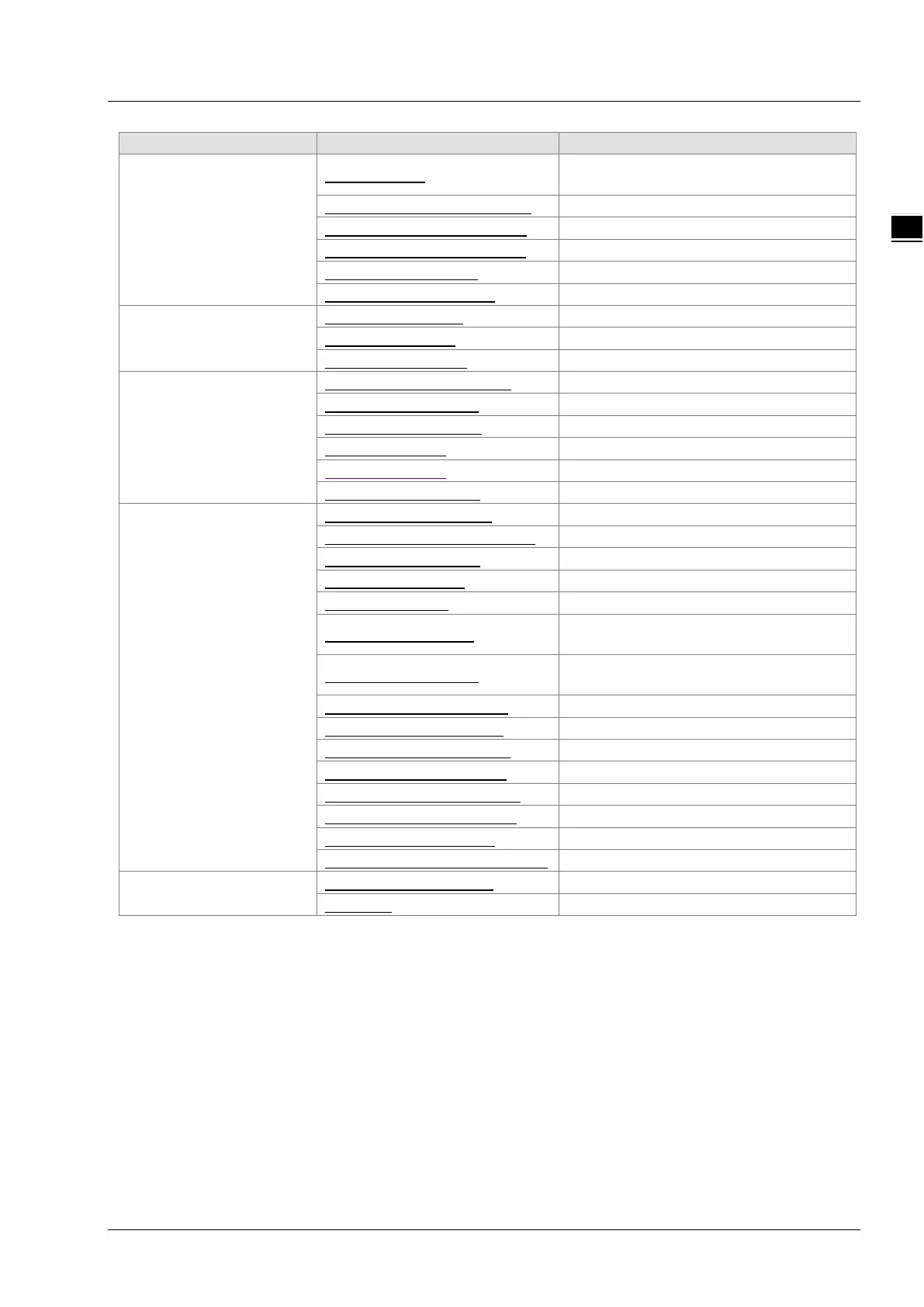
DMC_CamSet
Make the modified cam point info
effective
Application instructions
G Code Instructions
Cartesian-coordinate robot
Axes Group Instructions
Add an axis to an axes group
Remove an axis from an axes group
Remove all axes in an axes group
Stop the current axes group motion
DMC_ GroupInterrupt
Pause the current axes group motion
temporarily
DMC_ GroupContinue
Make the paused axes group continue
to run
Direct absolute positioning
Direct relative positioning
Linear absolute interpolation
Linear relative interpolation
Circular absolute interpolation
Circular relative interpolation
DMC_GroupReadActualPosition
Read actual position of axes in an group
Coordination Instructions
Incremental position control

 Loading...
Loading...








