Chapter 11 Motion Control Instructions
11-67
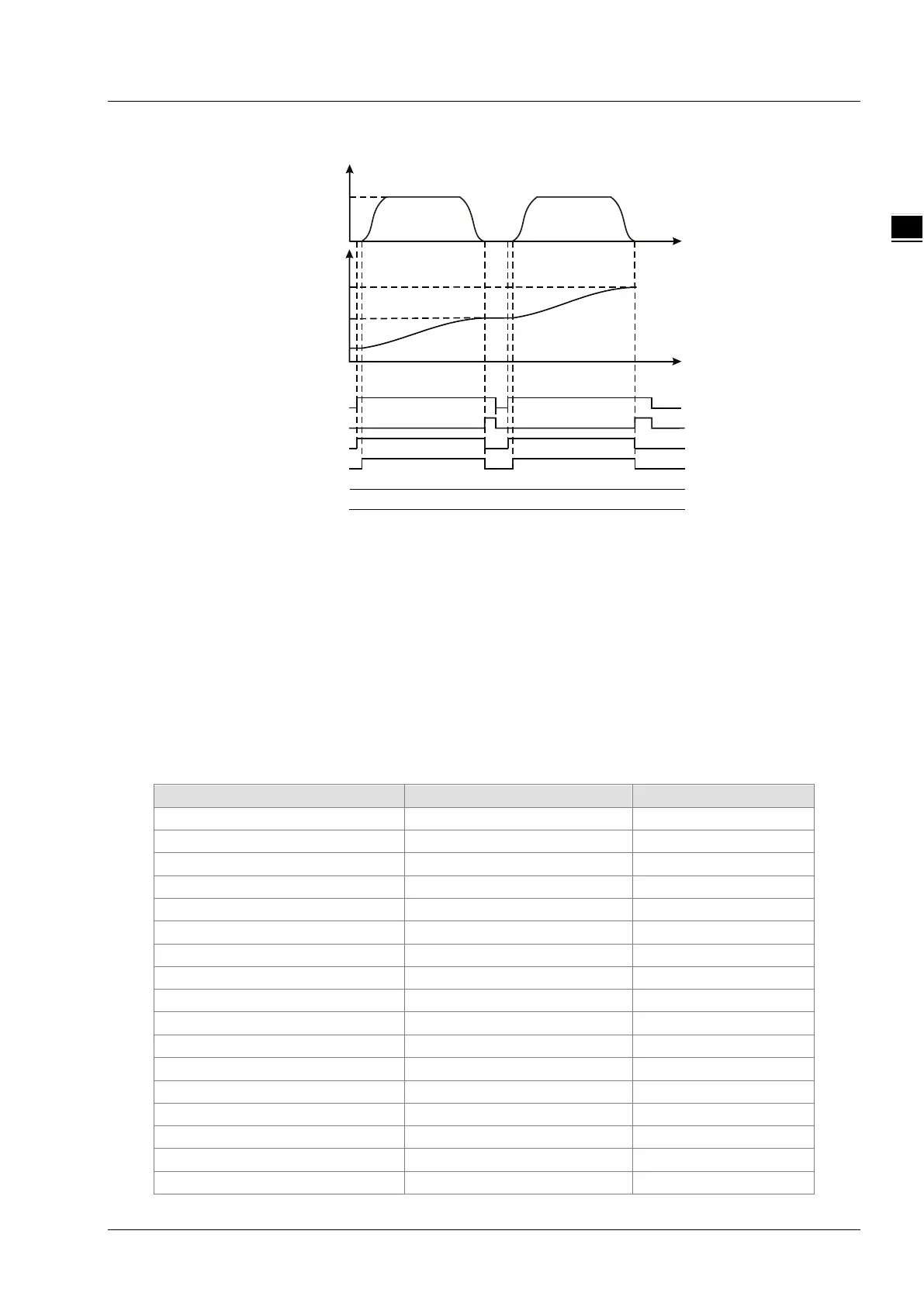
2. Motion Curve and Timing Chart:
When Sup_Ex changes to TRUE, Sup_Bsy changes to TRUE. One cycle later, Sup_Act
changes to TRUE and the motion controller controls the servo motor to run by using current
position as the reference point.
After the servo motor completes the superimposed positioning, Sup_Done changes to TRUE
and meanwhile Sup_Bsy and Sup_Act change to FALSE.
When Sup_Ex changes to FALSE, Sup_Done changes to FALSE.
When Sup_Ex changes to TRUE again after the servo motor completes the set distance, the
motion controller controls the servo motor to run. When the servo motor completes the set
distance, Sup_Done changes to TRUE again.
Programming Example 2
Below is the example that MC_MoveSuperimposed and MC_MoveRelative instructions are matched.
1. The variable table and program
Pwr_Sta BOOL
Pwr_Err BOOL
300
2000
7000
12000
Sup_Ex
Sup_Done
Sup_Bsy
Sup_Act
Sup_Abt
Sup_Err
Position
Velocity
Time
Time
Sup

 Loading...
Loading...








