D1-N Series Servo Drive User Manual Tuning
HIWIN MIKROSYSTEM Corp. 6-5
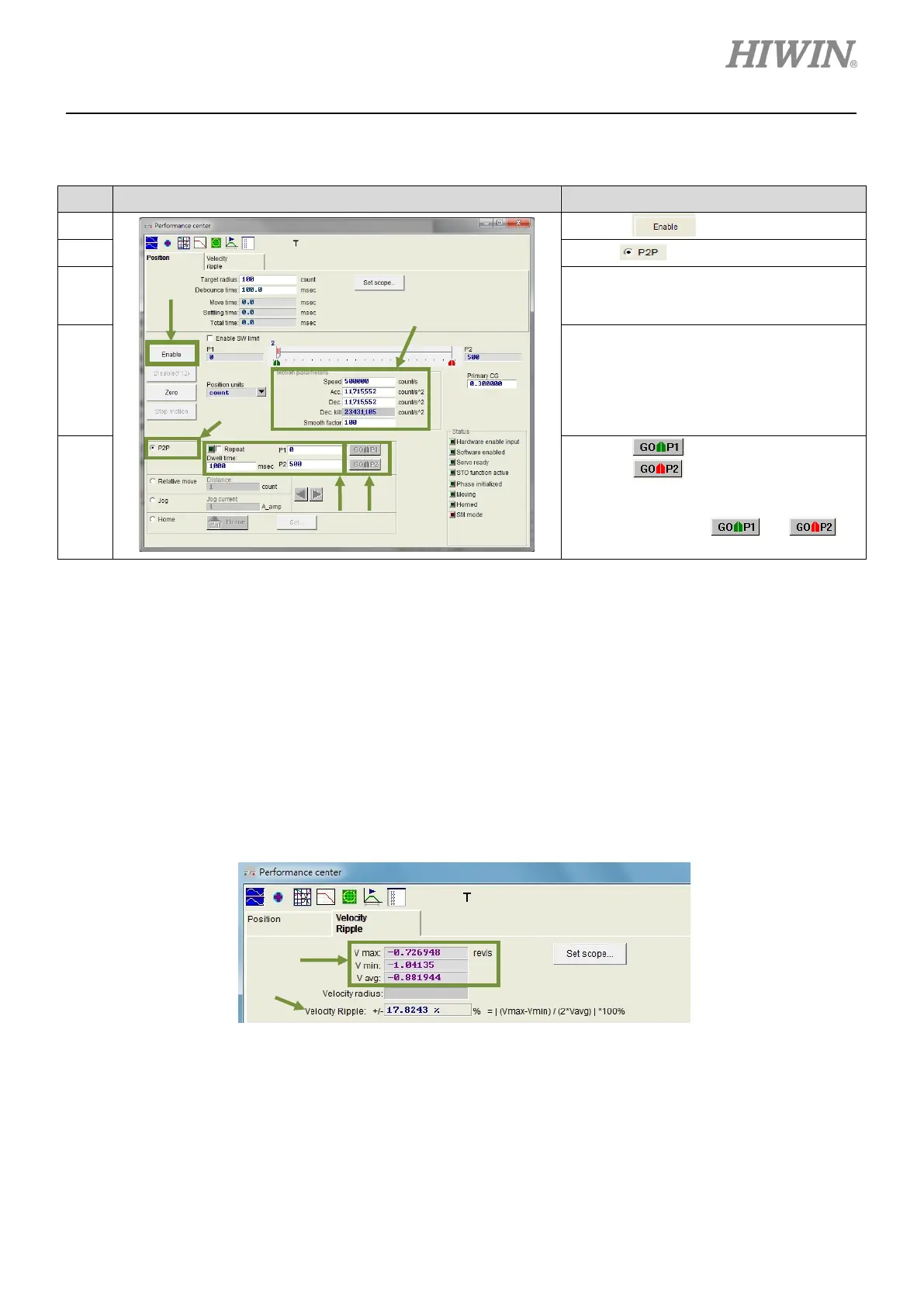
Below is the example of performing test run by point-to-point (P2P) motion.
Step Figure Description
1
Click on to enable the motor.
2
Select
.
3
Set P1 and P2. (If software limits are
used, ensure P1 and P2 are within Lower
SW limit and Upper SW limit.
4
Set desired speed, acceleration,
deceleration and smooth factor (Refer to
section 3.4.) in the setting area for motion
parameters. If users have no special
requirement, test run can be performed by
using the default values.
5
Click on
, the motor moves to P1.
Click on
, the motor moves to P2.
If repeated point-to-point (P2P) motion is
required, select Repeat and set dwell
time. Then click on
or to
perform point-to-point (P2P) motion.
Settling time can be measured in Performance center. Target radius and debounce time can also be set
in Performance center, please refer to section 5.5. During motion, primary CG can be adjusted to meet
the requirement of settling time. Higher servo gain can have faster response and shorter settling time.
Users can observe the required time for entering target radius by move time, settling time and total time.
(Refer to section 3.7.) Click on Set scope… button to show Scope to observe waveforms related to
settling time. Velocity ripple can be measured in Performance center. Users can observe velocity ripple by
point-to-point (P2P) motion. V max, V min, V avg and Velocity Ripple show the maximum speed,
minimum speed, average speed and velocity ripple of a constant speed phase. Click on Set scope…
button to show Scope to observe the waveforms related to velocity ripple.
Figure 6.2.2 Performance center-Velocity Ripple page
○2
○3
○4
○1
○5
○2
○1
 Loading...
Loading...
