D1-N Series Servo Drive User Manual Tuning
6-30 HIWIN MIKROSYSTEM Corp.
Step 1: Set desired acceleration, deceleration and travel distance. Perform point-to-point (P2P) motion.
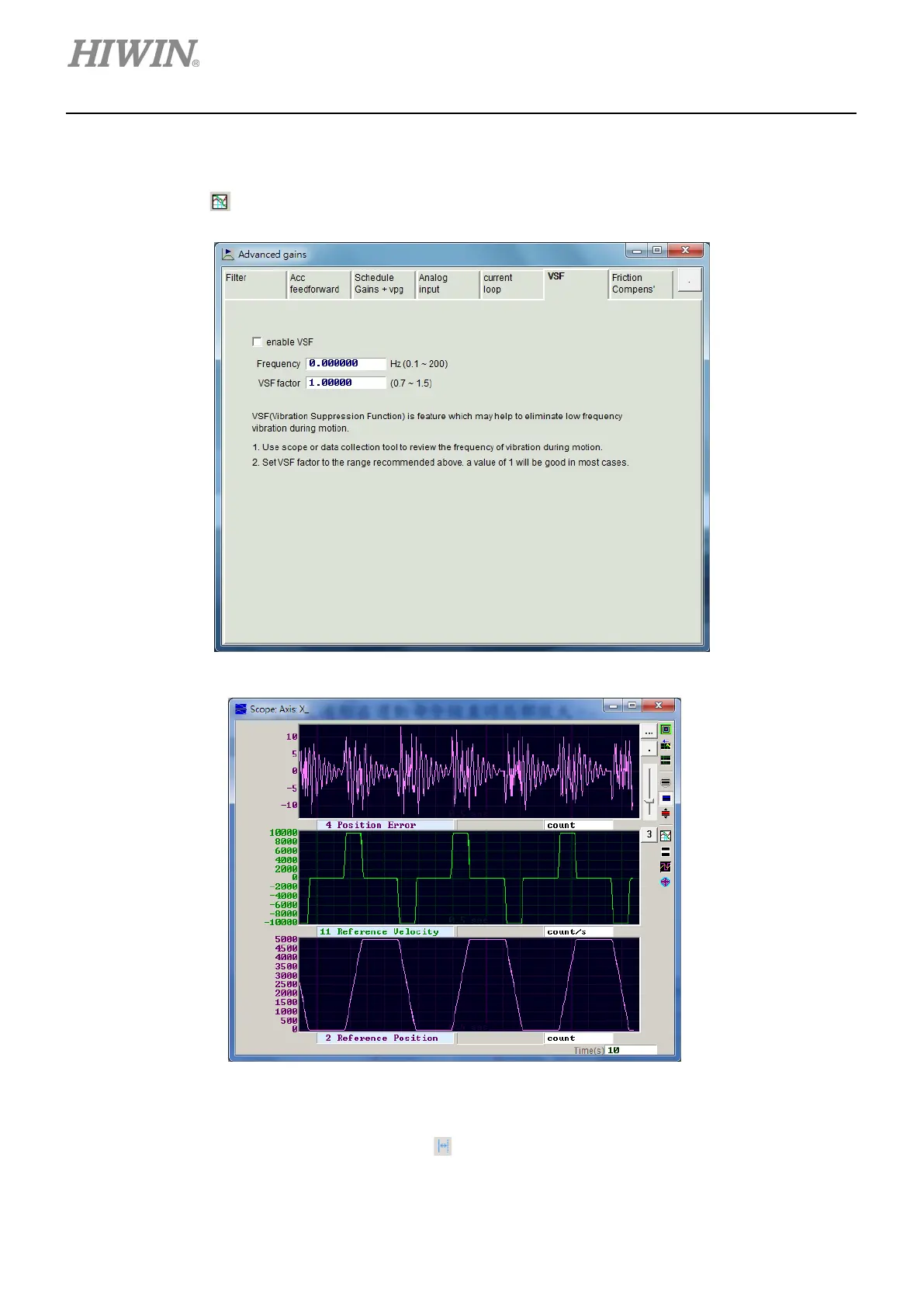
Step 2: Open Scope and observe position error and reference velocity, as figure 6.6.6.2.
Step 3: Click on
(Plot view) in Scope window for analyzing waveforms.
Figure 6.6.6.1 Vibration suppression filter
Figure 6.6.6.2
Step 4: As motion command completes, enlarge the graph of position error. Select the desired
segment, as figure 6.6.6.3. Click on
to zoom in on the segment. For related operation,
please refer to section 6.5.
 Loading...
Loading...
