6 Operating modes
6.1.5 Boundary conditions for a positioning move
6.1.5.1 Object entries
The boundary conditions for the position that has been moved to can be set in the following entries of the
object dictionary:
●
607A
h
: (Target Position): Planned target position
●
607D
h
: (Software Position Limit): Definition of the limit stops (see chapter Software limit switches)
●
607C
h
(Home Offset): Specifies the difference between the zero position of the controller and the
reference point of the machine in user-defined units. (See "Homing")
●
607B
h
(Position Range Limit): Limits of a modulo operation for replicating an endless rotation axis
●
607
h
(Polarity): Direction of rotation
●
6081
h
(Profile Velocity): Maximum speed with which the position is to be approached
●
6082
h
(End Velocity): Speed upon reaching the target position
●
6083
h
(Profile Acceleration): Desired starting acceleration
●
6084
h
(Profile Deceleration): Desired braking deceleration
●
6085
h
(Quick Stop Deceleration): Emergency-stop braking deceleration in case of the "Quick stop active"
state of the "CiA 402 Power State Machine"
●
6086
h
(Motion Profile Type): Type of ramp to be traveled; if the value is "0", the jerk is not limited; if the
value is "3", the values of 60A4
h
:1
h
–4
h
are set as limits for the jerk.
●
60C5
h
(Max Acceleration): The maximum acceleration that may not be exceeded when moving to the end
position
●
60C6
h
(Max Deceleration): The maximum braking deceleration that may not be exceeded when moving to
the end position
●
60A4
h
(Profile Jerk), subindex 01
h
to 04
h
: Objects for specifying the limit values for the jerk.
●
60F2
h
: (Positioning Option Code): Defines the positioning behavior
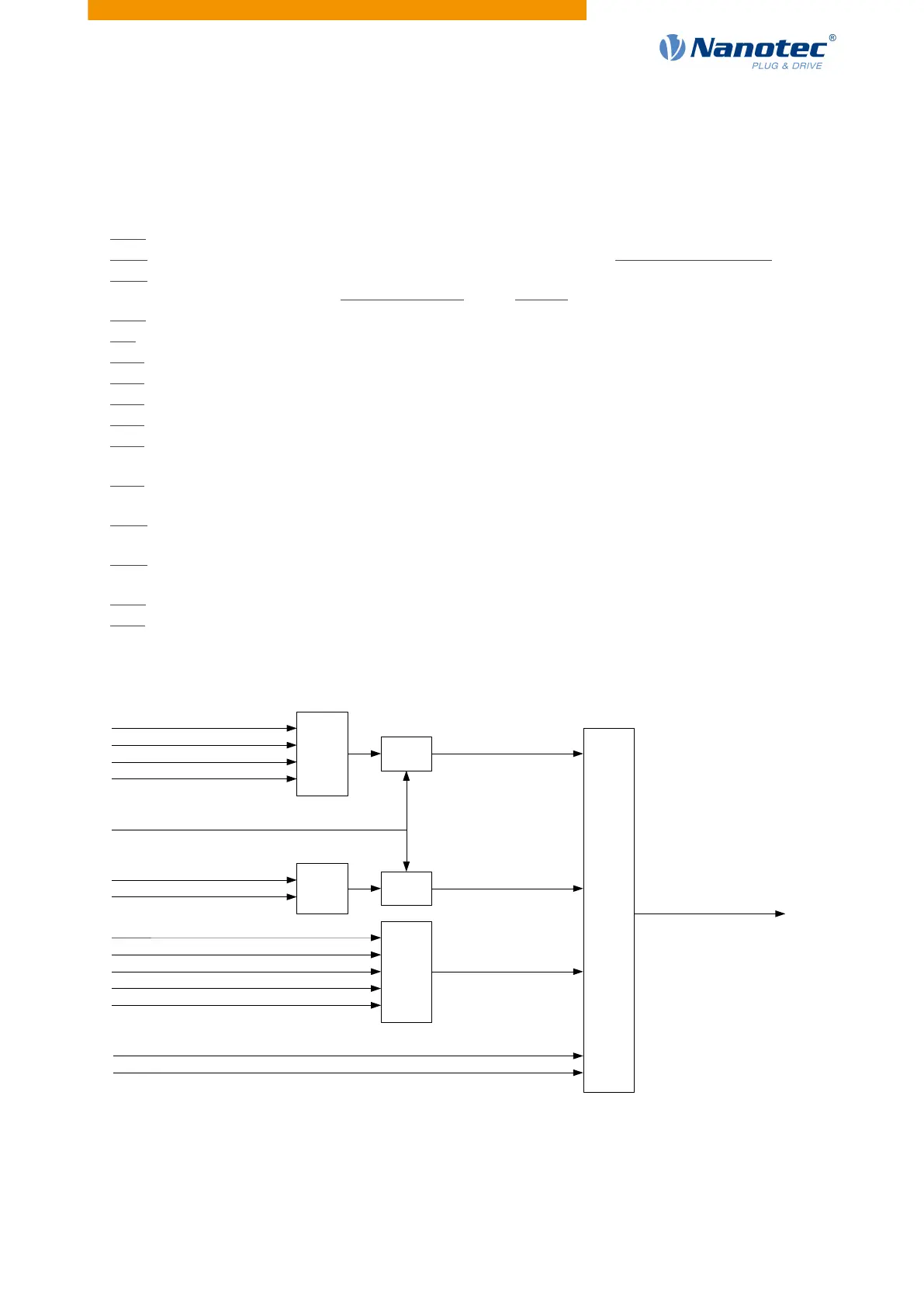
6.1.5.2 Objects for the positioning move
The following graphic shows the objects involved in the boundary conditions of the positioning move.
Limit
function
Target position 607A
h
Position range limit 607B
h
Software position limit 607D
h
Multiplier
Polarity 607E
h
Target position
Limit
function
Multiplier
Profile velocity 6081
h
End velocity 6082
h
Trajectory
generator
Profile velocity
or end velocity
Limit
function
Profile acceleration 6083
h
Profile deceleration 6084
h
Quick-stop deceleration 6085
h
Max acceleration 60C5
h
Max deceleration 60C6
h
Profile acceleration
or profile deceleration
or quick-stop deceleration
Quick-stop option code 605A
h
Motion profile type 6086
h
Position demand
internal value
Positioning option code 60F2
h
6.1.5.3 Parameters for the target position
The following graphic shows an overview of the parameters that are used for moving to a target position
(figure not to scale).
Version: 2.0.1 / FIR-v1650 54