5 General concepts
When entering values, the following applies correspondingly: Internal value = n
jerk
x input value
Example
2063
h
is set to the value "1", 2064
h
is set to the value "60". Thus, the user unit is "revolutions
per minute per second squared" and n
jerk
= 1/60.
If 60A4
h
is set to the value "500", the internal value is set to 500 rp(min * s
2
) x 1/60 = 8.3
rps
3
.
If object 2065
h
or object 2066
h
is set to "0", the firmware sets the value to "1".
5.4 Limitation of the range of motion
The digital inputs can be used as limit switches, as is described in chapter Digital inputs, if you activate this
function for the inputs. The controller also supports software limit switches.
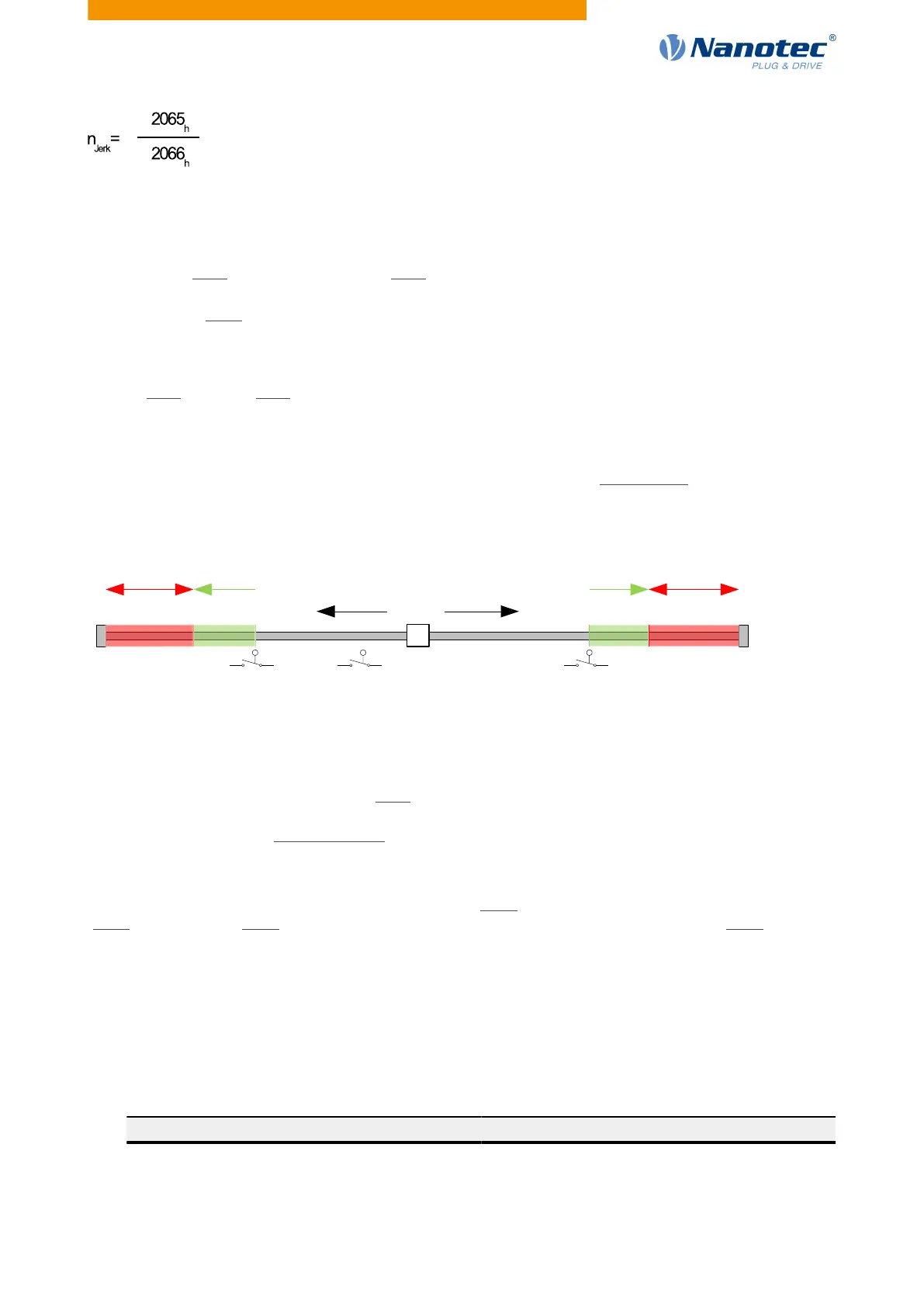
5.4.1 Tolerance bands of the limit switches
negative
direction
positive
direction
Tolerance-
zone 2056h
Forbidden
area
Tolerance-
zone 2056h
Forbidden
area
negative limit
switch
Positive limit
switch
reference
switch
The previous figure shows the breakdown of the tolerance bands next to the limit switches:
●
The tolerance zone begins immediately after the limit switch. Free movement is possible in this zone. The
length of the zone can be set in object 2056
h
.
●
If the motor moves into the forbidden range, the controller triggers an immediate stop and it switches to
the fault state, see also State transitions.
5.4.2 Software limit switches
The controller takes into account software limit switches (607D
h
(Software Position Limit)). Target positions
(607A
h
) are limited by 607D
h
; the absolute target position may not be larger than the limits in 607D
h
. If the
motor is located outside of the permissible range when setting up the limit switches, only travel commands in
the direction of the permissible range are accepted.
5.5 Cycle times
The controller operates with a cycle time of 1 ms. This means that data are processed every 1 ms; multiple
changes to a value (e.g., value of an object or level at a digital input) within one ms cannot be detected.
The following table includes an overview of the cycle times of the various processes.
Task Cycle time
Application 1 ms
NanoJ application 1 ms
Current controller 31.25 µs (32 kHz)
Version: 2.0.1 / FIR-v1650 45