6 Operating modes
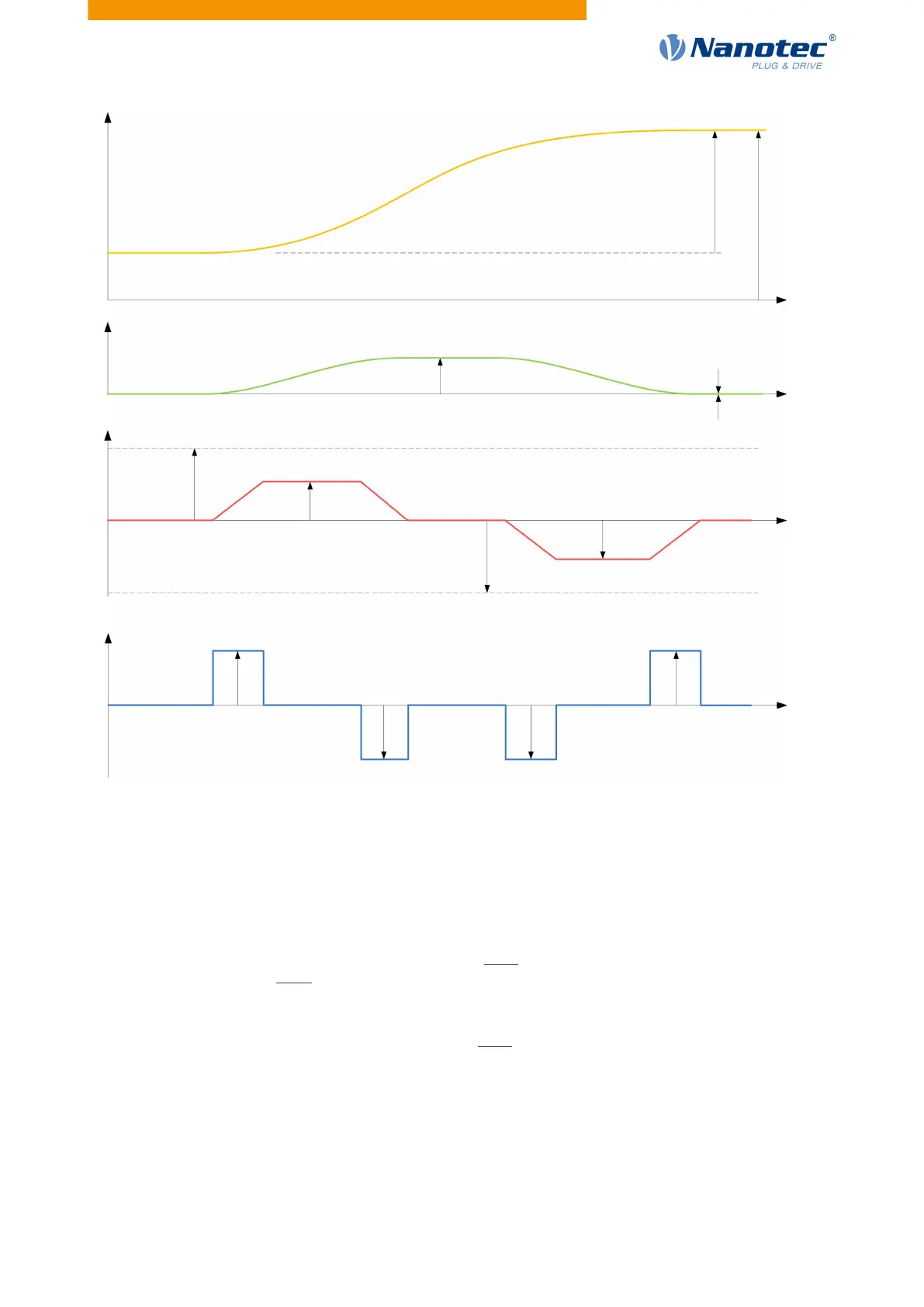
Set point (607A
h
)
Profile velocity (6081
h
)
t
t
t
t
relative (6040
h
Bit 6=1)
absolute (6040
h
Bit 6=0)
PositionAccelerationJerk
Speed
Max. acceleration (60C5
h
)
Begin acceleration
jerk (60A4
h
:1)
Begin deceleration
jerk (60A4
h
:3)
End acceleration
jerk (60A4
h
:2)
End deceleration
jerk (60A4
h
:4)
Max. deceleration (60C6
h
)
Profile acceleration (6083
h
)
Profile deceleration (6084
h
)
End velocity (6082
h
)
6.1.6 Jerk-limited mode and non-jerk-limited mode
6.1.6.1 Description
A distinction is made between the "jerk-limited" and "non-jerk-limited" modes.
6.1.6.2 Jerk-limited mode
Jerk-limited positioning can be achieved by setting object 6086
h
to "3". The entries for the jerks in
subindices :1
h
–4
h
of object 60A4 thereby become valid.
6.1.6.3 Non-jerk-limited mode
A "non-jerk-limited" ramp is traveled if the entry in object 6086
h
is set to "0" (default setting).
Version: 2.0.1 / FIR-v1650 55