6 Operating modes
a standstill. The braking deceleration is dependent here on the setting of the "Halt Option Code" in object
605D
h
.
6.6.5 Statusword
The following bits in object 6041
h
(statusword) have a special function:
●
Bit 10: Target position reached: This bit is set to "1" if the target position was reached (if the halt bit in the
controlword is "0") or the axis has speed 0 (if the halt bit in the last control word was "1").
●
Bit 11: Limit exceeded: The demand position is above or below the limit values set in 607D
h
.
●
Bit 12 (IP mode active): This bit is set to "1" if interpolation is active.
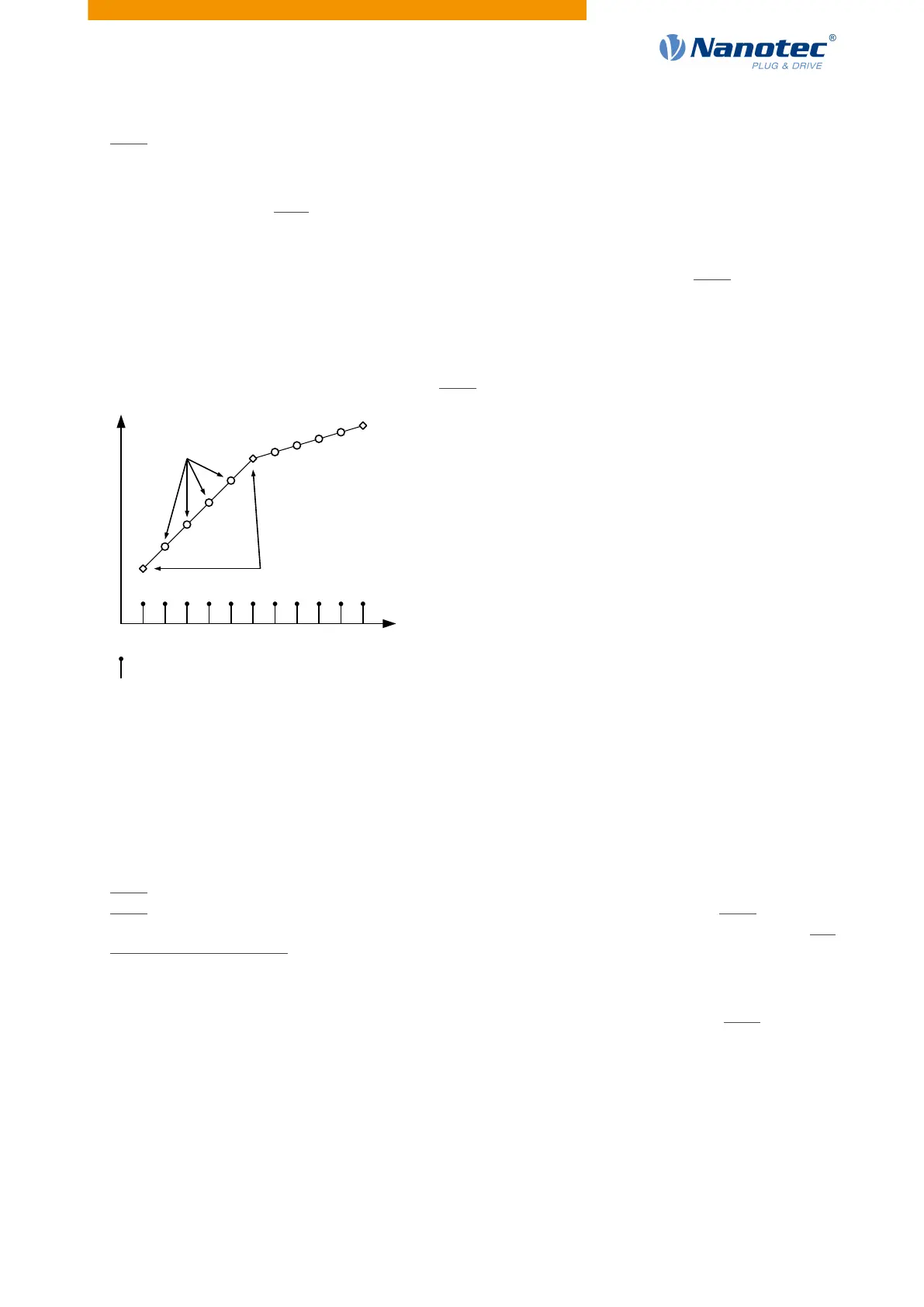
6.6.6 Use
The controller follows a linearly interpolated path between the current position and the preset target position.
The (next) target position must be written in record 60C1
h
:01
h
.
Synchronisation
Data given
Own interpolated
data
t
In the current implementation, only
●
linear interpolation
●
and a target position
are supported.
6.6.7 Setup
The following setup is necessary:
●
60C2
h
:01
h
: Time between two passed target positions in ms.
●
60C4
h
:06
h
: This object is to be set to "1" to be able to modify the target position in object 60C1
h
:01
h
.
●
To be able to turn the motor, the power state machine is to be set to the Operation enabled state (see CiA
402 Power State Machine)
6.6.8 Operation
After setting up, the task of the higher-level controller is to write the target positions to object 60C1
h
:01
h
in
time.
Version: 2.0.1 / FIR-v1650 71