6 Operating modes
6.5.2.5 Object entries
The following objects are necessary for controlling this mode:
●
607C
h
(Home Offset): Specifies the difference between the zero position of the controller and the
reference point of the machine in user-defined units.
●
6098
h
(Homing Method):
Method to be used for referencing (see "Homing method")
●
6099
h
:01
h
(Speed During Search For Switch):
Speed for the search of the switch
●
6099
h
:02
h
(Speed During Search For Zero):
Speed for the search of the index
●
609A
h
(Homing Acceleration):
Starting acceleration and braking deceleration for homing
●
2056
h
(Limit Switch Tolerance Band):
After reaching the positive or negative limit switch, the controller permits a tolerance range in which the
motor can continue to run. If this tolerance range is exceeded, the motor stops and the controller switches
to the "Fault" state. If limit switches can be actuated during homing, the tolerance range should be
selected such that the motor does not exit the tolerance range during braking. Homing cannot otherwise
be successfully performed. After homing is completed, the tolerance range can be reset to "0" if this is
required by the application.
●
203A
h
:01
h
(Minimum Current For Block Detection):
Minimum current threshold which, if exceeded, is to detect the blocking of the motor at a block.
●
203A
h
:02
h
(Period Of Blocking):
Specifies the time in ms that the motor is to continue to run against the block after block detection.
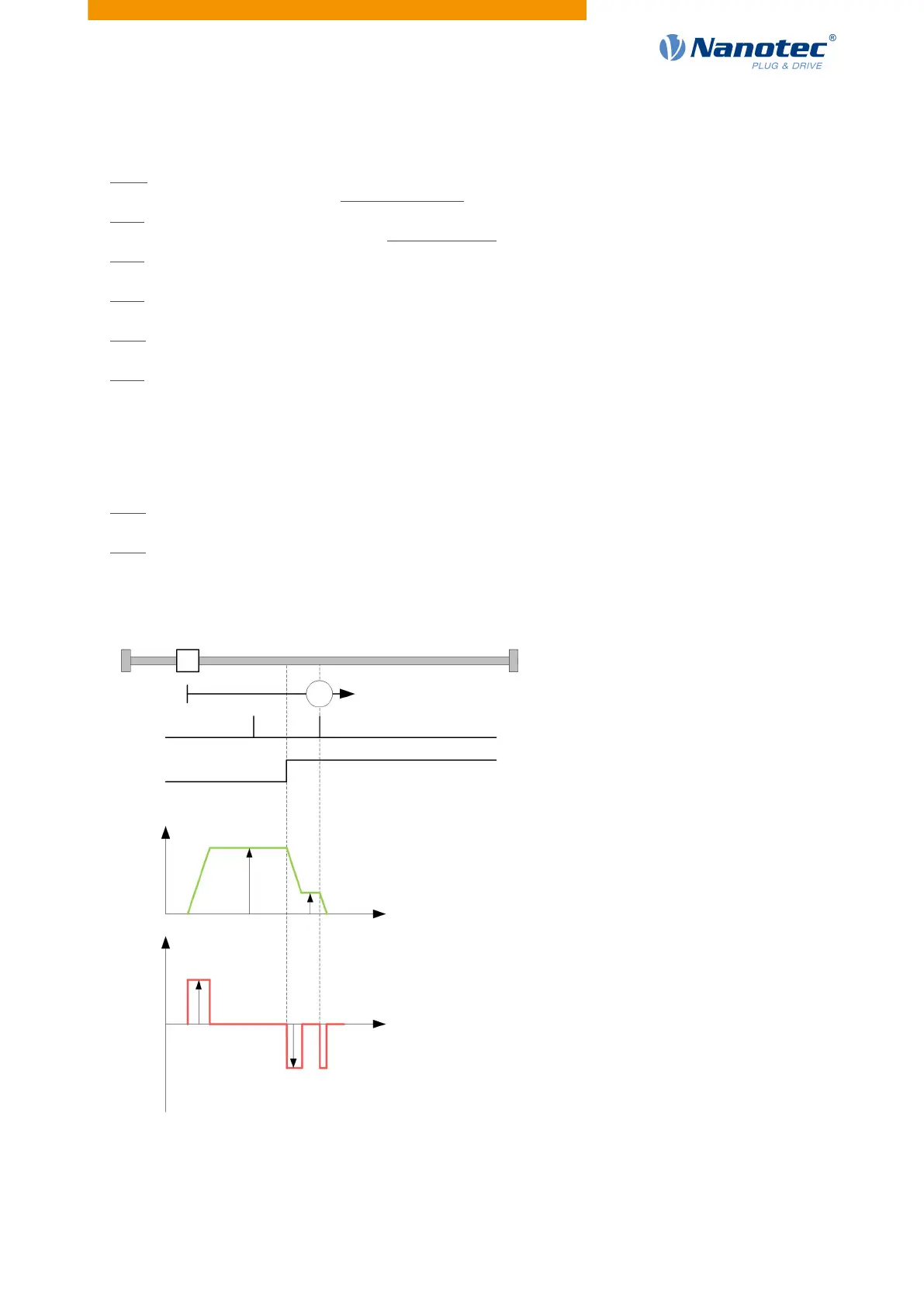
Homing speeds
The figure shows the homing speeds using method 4 as an example:
SpeedAcceleration
6099
h
:1
4
609A
h
609A
h
6099
h
:2
Index pulse
Reference
switch
Version: 2.0.1 / FIR-v1650 64